渲染优化-从GPU的结构谈起
- 作者:admin
- /
- 时间:2019年06月03日
- /
- 浏览:10114 次
- /
- 分类:厚积薄发
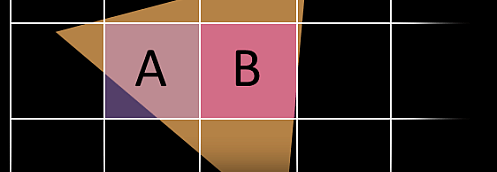
做渲染的时候我们都会遵循一些通用优化规则,比如:要尽量减少DrawCall、要尽量降低渲染的面数、要避免在Shader中使用循环判断、要减少采样的次数等等。要合并批次渲染,看起来的原则就是越少越好,我们也都知道GPU拥有强大的并行能力,这个所谓的并行是什么级别的并行?是三角形和三角形之间的并行吗?我也曾经在工程中碰到一个疑惑,在渲染面积相同的情况下,2个三角形快还是64个三角形快?会不会有可能64个三角形参与运算的GPU核心多,以至于会比2个三角形更快?
带着这些疑问,我们尝试了解GPU的结构,看看能不能找到答案,也会利用OpenGL的几个接口来验证我们的判断,GPU的硬件结构每家厂商的每代产品都是不一样的,但是大致的结构应该都是类似的。
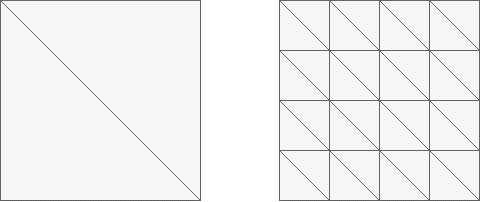
在渲染面积相同的情况下,左图还是右图渲染更快?
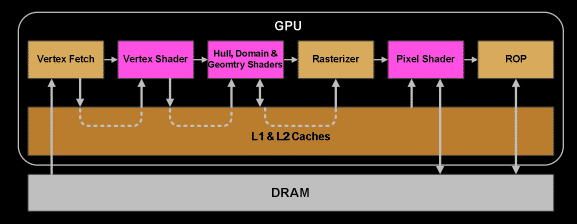
1、GPU渲染架构图
NV给出的这个图几乎涵盖了渲染的关键过程。
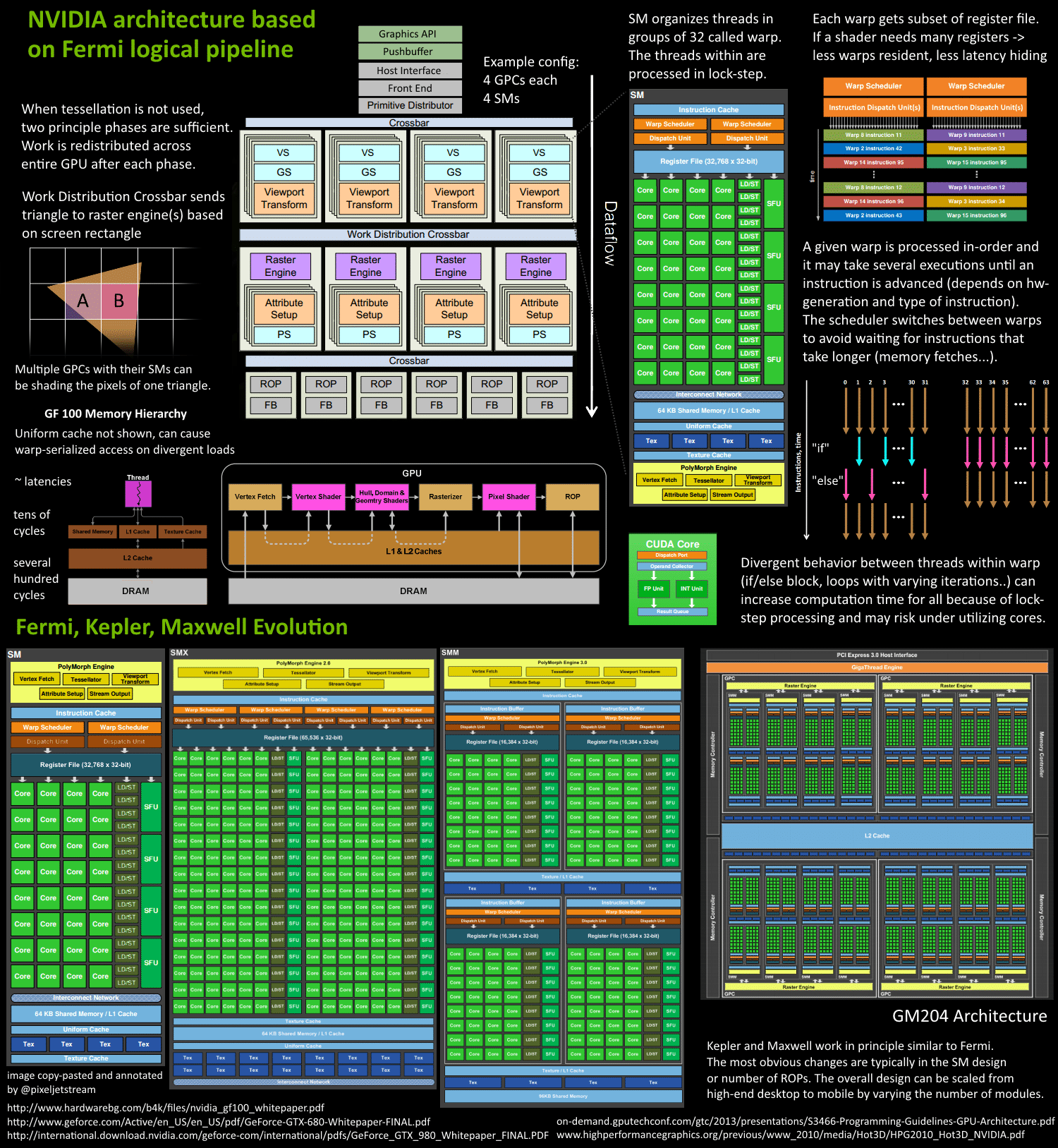
2、物理架构
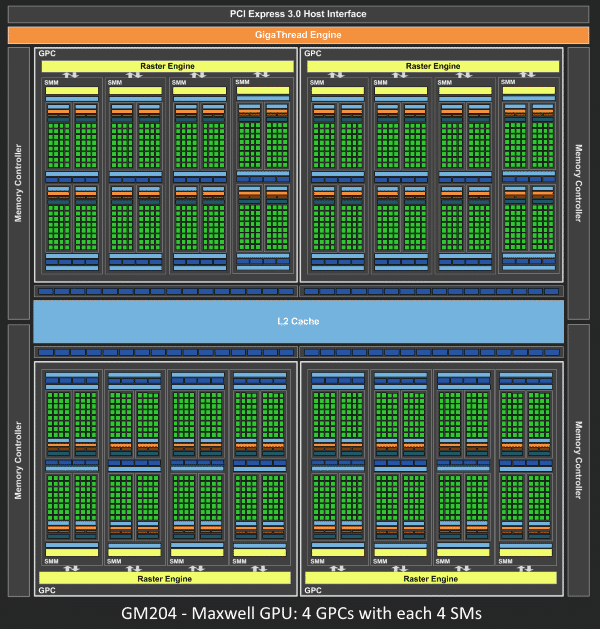
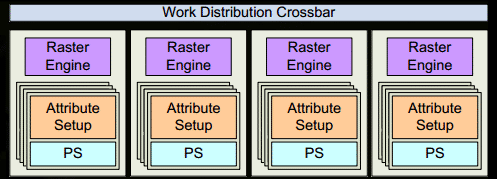
从Fermi开始Nvdia使用类似的原理架构,使用一个Giga Thread Engine来管理所有正在进行的工作,GPU被划分成多个GPCs(Graphics Processing Cluster),每个GPC拥有多个SM和一个光栅化引擎(Raster Engine),它们其中有很多的连接,最显著的是Crossbar,它可以连接GPCs和其它功能性模块,例如ROP或者其它子系统。
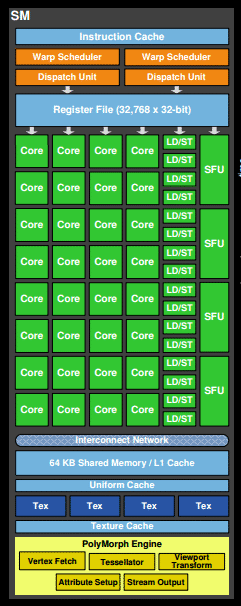
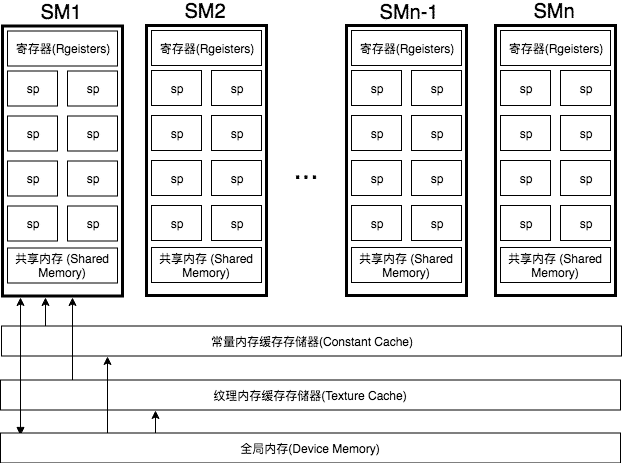
着色器程序的执行都是在SM上完成的。如上图所示,SM包含32个运算核心,16个LD/ST(load/store)模块来加载和存储数据,4个SFU(Special Function Units)执行特殊数学运算(sin、cos、log等),128KB寄存器,64KB L1缓存,全局内存缓存,Tex纹理读取单元,TextureCache纹理缓存,polyMorph Engine多边形引擎负责属性装配(attribute Setup)、顶点拉取(VertexFetch)、曲面细分、栅格化(这个模块可以理解专门处理顶点相关的东西),最后就是Warp Schedulers这个模块负责warp调度,一个warp由32个线程组成,warp调度器的指令通过Dispatch Units送到Core执行。
3、逻辑管线
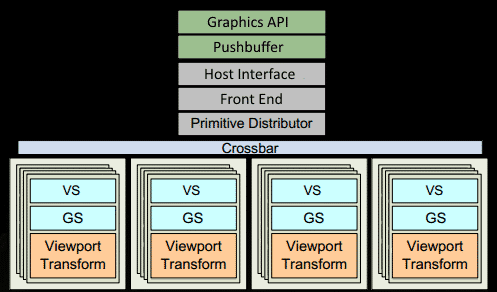
3.1、程序通过图形API(DX\GL\WEBGL)发出DrawCall指令,指令会被推送到驱动程序,驱动会检查指令的合法性,然后会把指令放到GPU可以读取的pushbuffer中。
3.2、经过一段时间或者显式调用flush指令后,驱动程序把pushbuffer的内容发送给GPU,GPU通过主机接口(Host Interface)接受这些命令,并通过Front End处理这些命令。
3.3、在图元分配器(Primitive Distributor)中开始工作分配,处理indexbuffer中的顶点产生三角形分成批次(batches),然后发送给多个GPCs,这一步的理解就是提交上来n个三角形,分配个这几个GPC同时来处理。
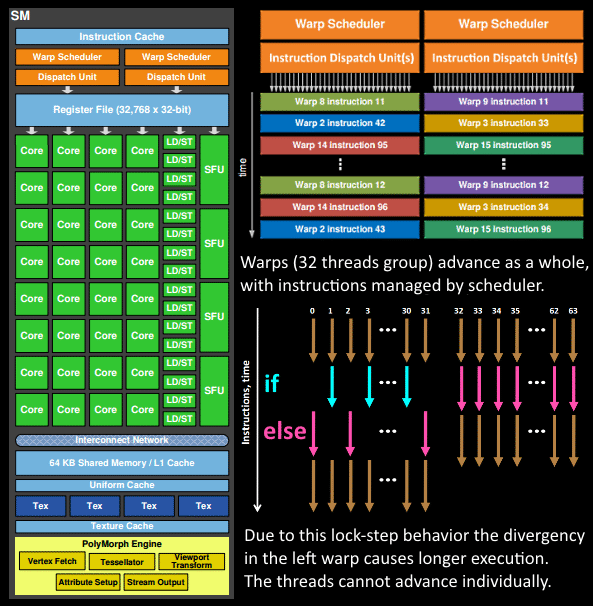
3.4、在GPC中,每个SM中的Poly Morph Engine负责通过三角形索引(triangle indices)取出三角形的数据(vertex data)[图中的Vertex Fetch模块]。
3.5、在获取数据之后,在SM中以32个线程为一组的线程束(warp)来调度,来开始处理顶点数据。warp是典型的单指令多线程(SIMT,SIMD单指令多数据的升级)的实现,也就是32个线程同时执行的指令是一模一样的,只是线程数据不一样,这样的好处就是一个warp只需要一个套逻辑对指令进行解码和执行就可以了,芯片可以做的更小更快,之所以可以这么做,是由于GPU需要处理的任务是天然并行的。
3.6、SM的warp调度器会按照顺序分发指令给整个warp,单个warp中的线程会锁步(lock-step)执行各自的指令。如果线程碰到不激活执行的情况也会被遮掩(be masked out),被遮掩的原因有很多,例如当前的指令是if(true)的分支,但是当前线程的数据的条件是false,或者比如一个循环被终止了但是别的还在走,因此在Shader中的分支会显著增加时间消耗,在一个warp中的分支除非32个线程都走到if或者else里面,否则相当于所有的分支都走了一遍,线程不能独立执行指令而是以warp为单位,而这些warp相互之间是独立的。
3.7、warp中的指令可以被一次完成,也可能经过多次调度,例如SM中的加载纹理、数据存取明显少于数学运算。
3.8、由于某些指令比其它指令需要更长的时间才能完成,特别是内存加载,warp调度器可能会简单地切换到另一个没有内存等待的warp,这是GPU如何克服内存读取延迟的关键,只是简单地切换活动线程组。为了使这种切换非常快,调度器管理的所有warp在寄存器文件中都有自己的寄存器。这里就会有个矛盾产生,Shader需要越多的寄存器,就会给warp留下越少的空间,就会产生越少的warp,这时候在碰到内存延迟的时候就只是等待,而没有可以运行的warp可以切换。
3.9、一旦warp完成了vertex-shader的所有指令,运算结果会被Viewport Transform模块处理,三角形会被裁剪然后准备栅格化,GPU会使用L1和L2缓存来进行vertex-shader和pixel-shader的数据通信。
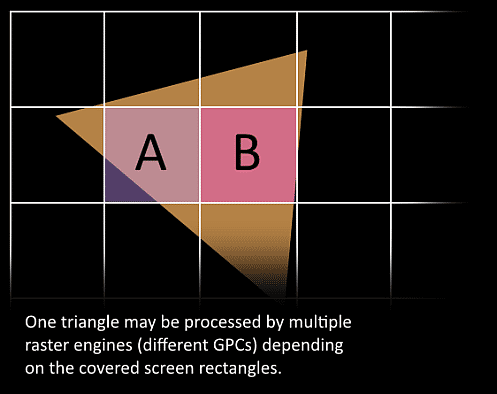
3.10、接下来这些三角形将被分割,再分配给多个GPC,三角形的范围决定着它将被分配到哪个光栅引擎(raster engines),每个raster engines覆盖了多个屏幕上的tile,这等于把三角形的渲染分配到多个tile上面,也就是像素阶段就把按三角形划分变成了按显示的像素划分了。
3.11、SM上的Attribute Setup保证了从vertex-shader来的数据经过插值后是pixel-shade是可读的。
3.12、GPC上的光栅引擎(raster engines)在它接收到的三角形上工作,来负责这些这些三角形的像素信息的生成(同时会处理背面剔除和early z剔除)。
3.13、32个像素线程将被分成一组,或者说8个2X2的像素块,这是在像素着色器上面的最小工作单元,在这个像素线程内,如果没有被三角形覆盖就会被遮掩,SM中的warp调度器会管理像素着色器的任务。
3.14、接下来的阶段就和vertex-shader中的逻辑步骤完全一样,但是变成了在像素着色器线程中执行。 由于不耗费任何性能可以获取一个像素内的值,导致锁步执行(SIMD)非常便利,所有的线程可以保证所有的指令可以在同一点。

3.15、最后一步,现在像素着色器已经完成了颜色的计算还有深度值的计算,在这个点上,我们必须考虑三角形的原始API顺序,然后才将数据移交给渲染输入单元ROP(Render Output Unit),一个ROP内部有很多ROP单元,在ROP单元中处理深度测试,和framebuffer的混合,深度和颜色的设置必须是原子操作,否则两个不同的三角形在同一个像素点就会有冲突和错误。
4、内存速度
GPU的内存分为好几个类型,不同类型的速度不一样。

这里看到在Shader中直接使用的寄存器内存还是比较快的,纹理和常量内存的还有全局内存的速度实在是慢太多。
5、试验验证
接下来用我自己的显卡,这个显卡是GeForce GT 755M,只有2个SM,每个SM最大64个warp,每个warp中最多32个thread,配合NV的OpenGL扩展,通过gl_ThreadInWarpNV,gl_WarpIDNV,gl_SMIDNV这几个指令我们可以验证一下上面的流程,同时可以确定一些上面没有提到的东西。
5.1 顶点处理
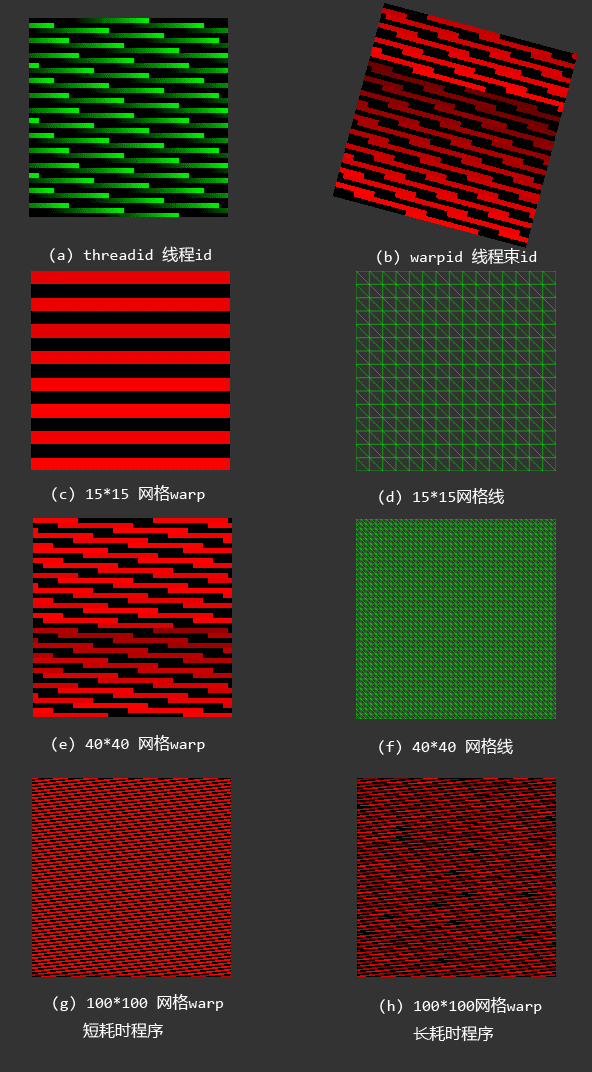
- (a)图是按ThreadID(color.g=gl_ThreadInWarpNV/gl_WarpSizeNV)来输出的,三角网格是100*100,可以看到一个线程对应一个顶点,一个warp对应一组顶点。
- (b)图是按WarpID(color.r=gl_WarpIDNV/gl_WarpsPerSMNV)来输出的,三角网格是。100*100,网格倾斜了15度。黑色的是另外一个SM的。
- (c)图是WarpID,三角网格是15*15的。统计后的warp数是8。
- (d)图可以看到对应的三角网格线。
- (e)图是WarpID,三角网格是40*40的。统计后的warp数是25。
- (f)图可以看到对应的三角网格线。
- (g)图是WarpID,三角网格是100*100的。统计后的warp数是23。顶点着色器是比较简单的。
- (h)图是WarpID,三角网格是100*100的。统计后的warp数是58。作为(g)的对比图,顶点着色器直接做了一个100万次的循环,目的是拉长顶点着色器的完成时间。
通过这些图的对比我们可以得出结论:
5.1.1、对比(a)和(b),顶点着色器是以一个顶点为一个线程来处理的,32线程为一个warp;
5.1.2、对比(c)和(d)其中的warp数,可以看到顶点越多warp数就越多;
5.1.3、对比(g)和(h)其中的warp数,系统调用的warp会根据顶点数和顶点着色器的任务来分配,越少的顶点warp越少,而且每个着色器上的warp数不会按照最大数来分配,毕竟warp数是软件概念,当单个warp时间过长时,系统为了隐藏延迟会调用更多的warp来参与计算;
5.1.4、顶点着色器最终的运行效率会取决于顶点数和复杂程度。但是在真实的环境中顶点数不会是真正的瓶颈,20个顶点和200个顶点差别不会很大。
5.2 像素处理
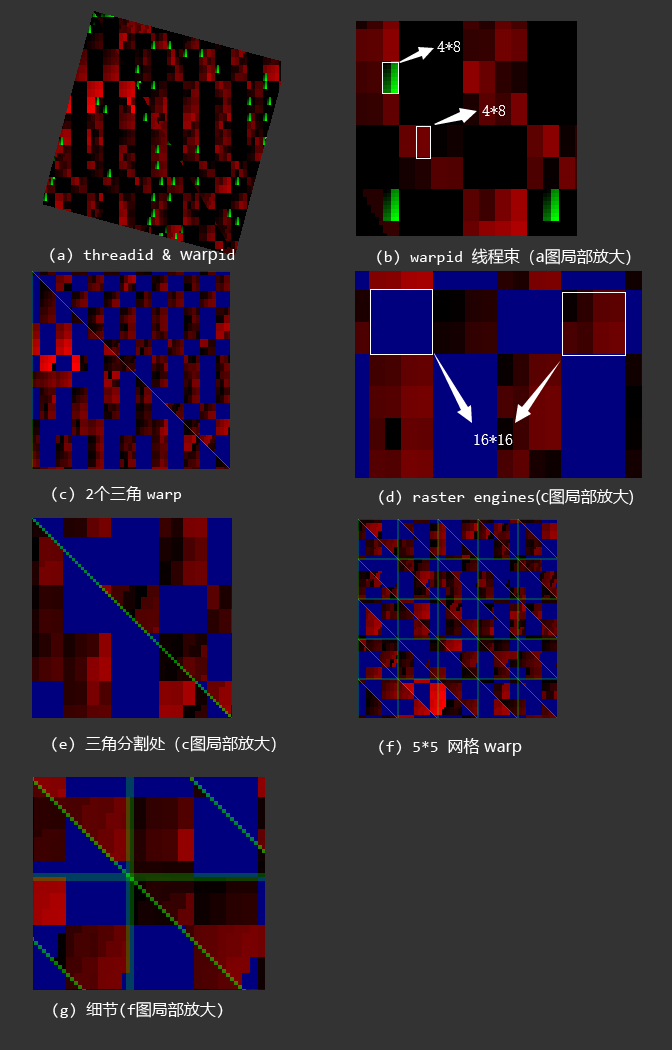
这个图和顶点的处理的类似,只是换成像素阶段,另外另外一个SM换成蓝色方便观察。
- (a)图直接显示出来warp和thread,thread是绿色的块,thread是warp等于0的时候才显示;
- (b)图是(a)图的局部放大,一个线程块是4*8个像素;
- (c)图是两个三角的warp,蓝色的是另外一个SM的,可以看到按块来着色,其中一个块就是一个光栅化引擎;
- (d) 、(e)图都是(c)图的放大;
- (f)图是5*5的网格;
- (g)图是(f)图的放大细节。
根据上面的我们可以得出一些结论:
5.2.1、观察(a),可以看到这个三角形是倾斜的,可以到里面的分块并没有倾斜而是始终平行于屏幕,所以光栅化会无视原来三角的位置,只会处理三角覆盖屏幕的位置,这个和顶点程序是完全不一样的;
5.2.2、观察(b),可以看到一个像素就是一个thread,像素着色依旧是按照warp来调度的;
5.2.3、观察(d),每个光栅化引擎(raster engines)都是1616的像素块,也就是每个包含44一个warp;
5.2.4、对比(d)、(e)、(g),在三角分割出,可以看到如果一个光栅化引擎恰好覆盖两个三角,那么两个三角会有可能被两个SM覆盖,这里可以确定这个光栅化引擎包含两个SM,一个光栅化引擎在处理覆盖的像素的时候,如果覆盖的区域包含多个三角,每个三角都有可能被不同的SM处理,但是不同的三角分配的warp肯定是不同的,同时在(g)图也可以看到即使一个光栅化引擎只包含一个三角,可有可能分配给不同的SM里面的不同warp处理;
5.2.5、光栅化块是按照顺序一个一个在进行。
6、结论
到此为止我们就可以得出一些结论:
6.1、顶点着色器和像素着色都是在同一个单元中执行的(在原来的架构中VS和PS的确是分开的,后来NV把这个统一了)VS是按照三角形来并行处理的,PS是按照像素来并行处理的。
6.2、VS和PS中的数据是通过L1和L2缓存传递的。
6.3、warp和thread都是逻辑上的概念,SM和SP都是物理上的概念。线程数≠流处理器数。
6.4、上述第12步里面z-cull是early z optimization而不是常说的z-test,z-test是要在ROP的时候发生,但是这个z-cull要在alpha test、user clip、multi-sampling、texkill都是关闭的情况下才能生效,任何导致需要混合后面颜色的操作都会导致z-cull失败。
同时也能回答开头中提到的问题了。
- 为什么DrawCall越少越好?因为即使渲染一个三角形,在GPU中也要走系列复杂的流程,这系列流程带来的延迟远超过计算一个三角本身,只有同时并行多处理才能发挥GPU的强大并行能力,这也是我们优化的时候要合并渲染的原因,越合并越能最大限度的利用GPU。总之一句话我们拿到的GPU是冲锋枪,冲锋枪最大的优势是连发,不能老用点射把冲锋枪当步枪用。
- 为什么要降低渲染面数?面数越少VS计算使用的线程就越少,顶点计算就越快。
- 为什么要避免在Shader中使用if else?因为按照SIMD的执行方式,if else可能会完全不生效,导致两个分支都要走一遍。同样循环中的break也会导致这样的问题。
- 为什么要降低采样次数?因为纹理的读取速度实在是太慢了,读取跟不上运算会导致极大的延迟。
- 一个和多个三角形哪个更快?当然是一个更快了,在覆盖面积相等的情况下顶点越少越好。
另外还有一个,我想提一下涉及CPU和GPU的交互,CPU和GPU是类似服务端-客户端的模式,它们之间的交互成本也是很高的,GPU的调用指令也是越少越好,最简单的一个就是类似gl里面uniform的设置,uniform设置的数据量都是比较小的,这会导致指令调用成本大于数据传送成本,如果Shader中大量的uniform vec3类似的东西还是合并成数组一次送入GPU(当然这会降低程序可读性,需要权衡)。另外一个任何从GPU回读的操作都是相当耗时的,即时是类似gl中获得句柄的操作,比如getUniformLocation,要避免在刷帧中使用。
7、TileBase
说完桌面版的GPU架构,顺带说下移动端的架构,移动端的GPU架构和桌面版本是完全不同的,桌面版的ROP单元是负责把结果写入framebuffer,处理器跟显存是在一块的导致这块几乎不太有什么耗时。但是到了移动端,显存是在主存上面的,它离显卡的核心太远了,导致这块的带宽很低,即时现在手机的显卡越来越好(但是屏幕分辨率也越来越大)带宽依旧是个瓶颈,主存的速度又太慢,导致这个操作又慢又费电,至少桌面端是不用考虑费电的问题的。基于此移动端都是用了tile-based架构。
7.1 主要区别
前面我们分析了NVDIA显卡的渲染的详细过程,这个我们只需要说区别就好了,桌面版都是VS-PS直接进行的,但是Tile-based把这个阶段分开了,在一帧中包含数百次DrawCall,注意这里是一帧的所有DrawCall,先全部进行VS,然后在按照tile的顺序PS,桌面是一个DrawCall的VS然后PS,桌面版也是用tile的模式来PS的,只不过桌面的PS都是一次DrawCall,但是移动端是顺序VS然后按照tile打包PS。
7.2 为什么会快
举个例子,比如我们有两次DrawCall,每个DrawCall包含一个三角形,这两个三角形都覆盖全部屏幕了。
在桌面版中,第一次DarwCall对第一个三角形进行VS-PS,这时候要对framebuffer操作一次,第二个DrawCall还要执行同样的处理就需要对framebuffer再操作一次(至少进行一次读的操作,如果第二个三角不覆盖第一个三角就少一次写的操作)。
在Tile-base中,两次DrawCall,执行两次VS,不操作framebuffer,然后在每个tile上,处理两个三角形,处理完这两个三角,也就确定最终的像素颜色了,直接吧这个颜色写入framebuffer就可以了,等于是framebuffer只有一次的写入操作,这里面还有另外的优化。
上面的设计是为了解决主要的带宽的问题,同时会产生很多其它的优化。
在桌面版,每个三角都要进行PS,但是在Tile-base中就可以提前进行z-test,有可能会使PS只进行一次就够了(GPU会对此优化,想办法剔除隐藏的面),颜色混合就快多了,不需要跟framebuffer有关系,都是在tile上进行的。还有个问题就是VS-PS不是在一帧中进行的,这一帧的PS是使用上一帧的VS。
这篇文章从架构的角度解释了常用优化手段的背后原因,如果哪个内容有误,欢迎大家指正。
这是侑虎科技第554篇文章,感谢作者刘小刘供稿。欢迎转发分享,未经作者授权请勿转载。如果您有任何独到的见解或者发现也欢迎联系我们,一起探讨。(QQ群:793972859)
作者主页:https://www.zhihu.com/people/liu-fei-69,作者也是U Sparkle活动参与者,UWA欢迎更多开发朋友加入U Sparkle开发者计划,这个舞台有你更精彩!