UE5 Chaos物理|创建物理世界对象
- 作者:admin
- /
- 时间:4月8日
- /
- 浏览:887 次
- /
- 分类:厚积薄发
【USparkle专栏】如果你深怀绝技,爱“搞点研究”,乐于分享也博采众长,我们期待你的加入,让智慧的火花碰撞交织,让知识的传递生生不息!
物理系统与物理世界
物理系统是每个游戏引擎必备的功能,可以让游戏模拟真实世界的物理规则。而现代游戏引擎中的“物理”,应该称为刚体动力学。刚体(Rigidbody)是理想化、无限坚硬、不变形的固体物理。动力学(Dynamics)是一个过程,计算刚体怎样在力(Force)的影响下随时间移动及相互作用。
在游戏世界背后,有一个镜像的物理世界,其中不关心Actor的视觉表现,只关注Actor的形状、物理材质等信息。简单使用场景下,只要把所有Actor当成刚体处理即可。
以常见的StaticMeshActor为例。下图左侧是Editor窗口,右侧是Chaos Visual Debugger看到的物理世界。
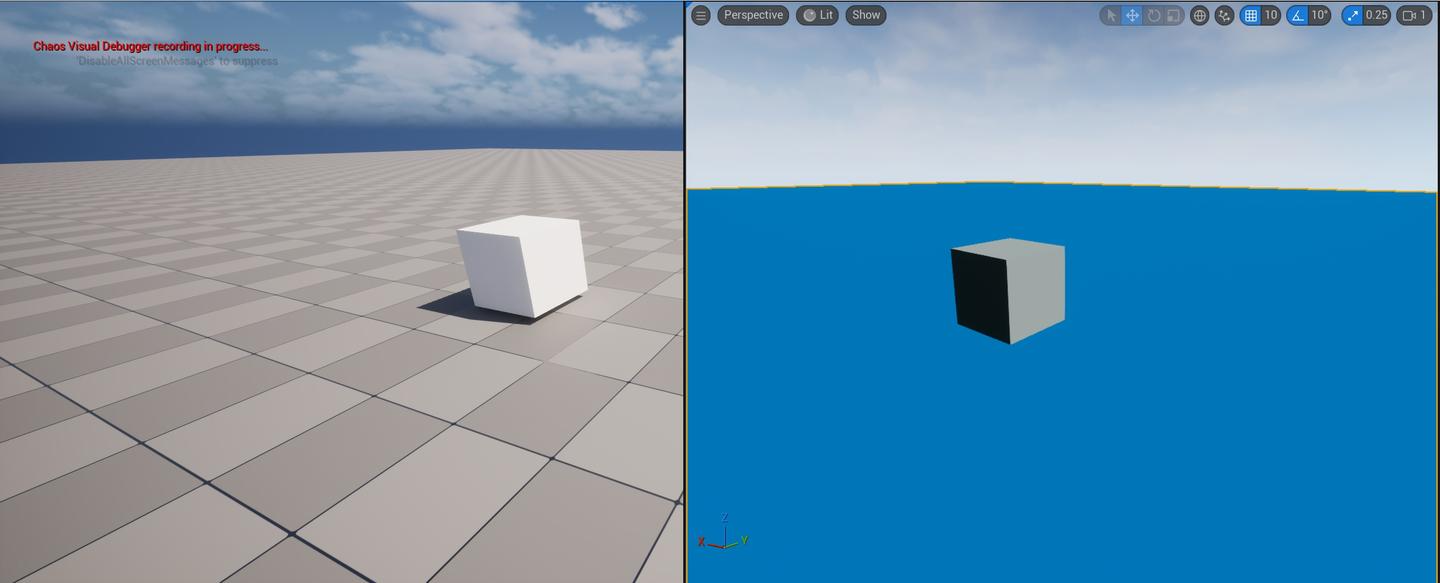
UE5的物理引擎已经从PhysX改成了Chaos,可能物理查询速度会慢些,但更适合做物理破坏效果,而且数据结构和游戏引擎统一,不需要再做转换。
物理世界类
UWorld是代表由Actor构成的整个游戏世界,它持有一个FPhysScene来代表物理世界,可以类比为渲染中的FScene,物理世界的步进(Advance)初始也由UWorld::Tick()发起。UWorld与物理相关的功能一般在PhysLevel.cpp中实现。FPhysScene等价于FPhysScene_Chaos,继承自FChaosScene,是Chaos的首要入口。碰撞事件的注册分发,物理网络同步相关的内容也由其处理,物理模拟的步进也在该类开始(StartFrame)。
示例:创建一个StaticMeshComponent
StaticMesh的物理配置
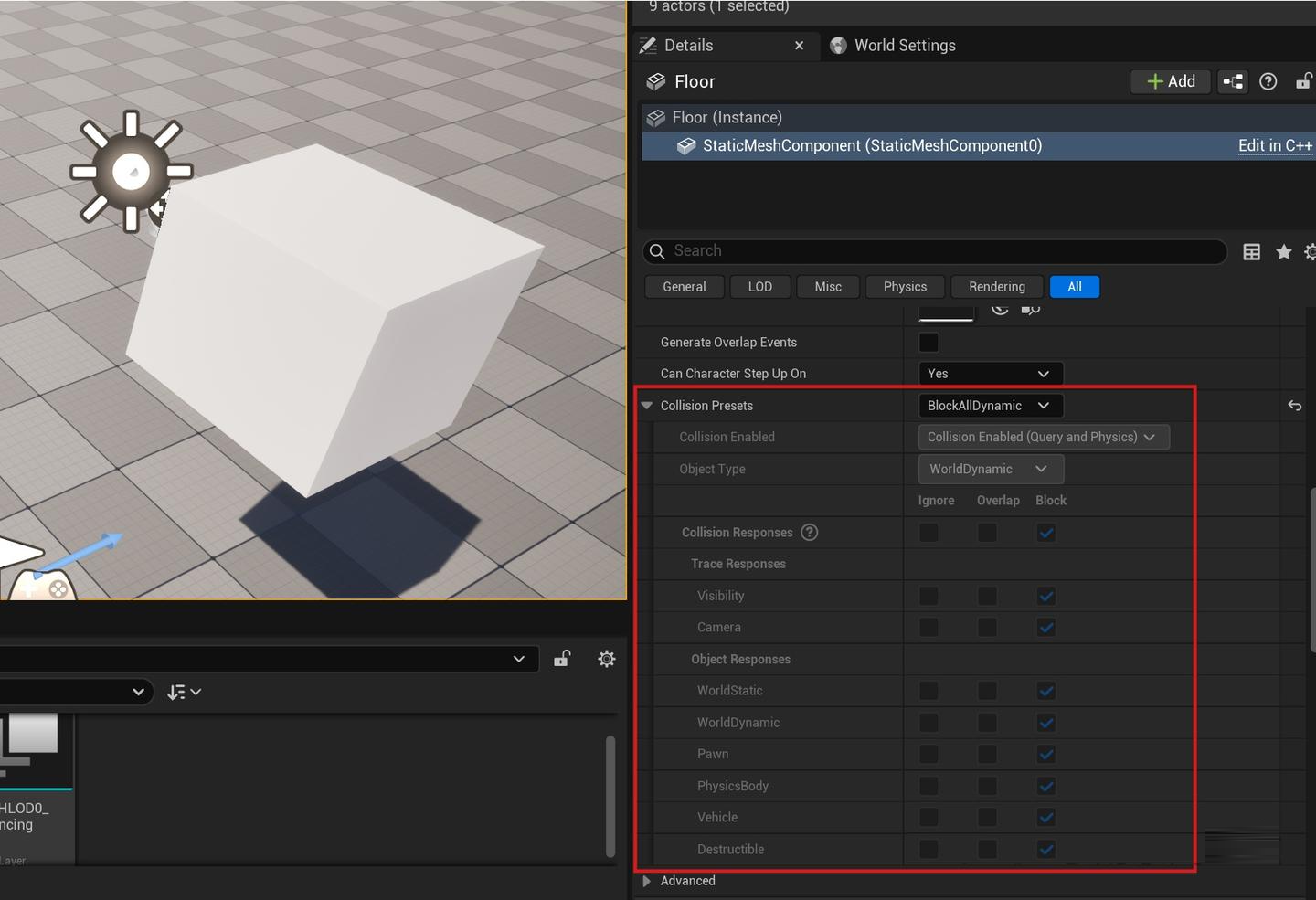
编辑器中,可以给StaticMesh设置碰撞,这里直接使用和模型大小一样的Box碰撞即可。还有其他很多选项,如Sphere、Capsule、凸包等,面对复杂模型时会用多种基础形状拼出一个碰撞。
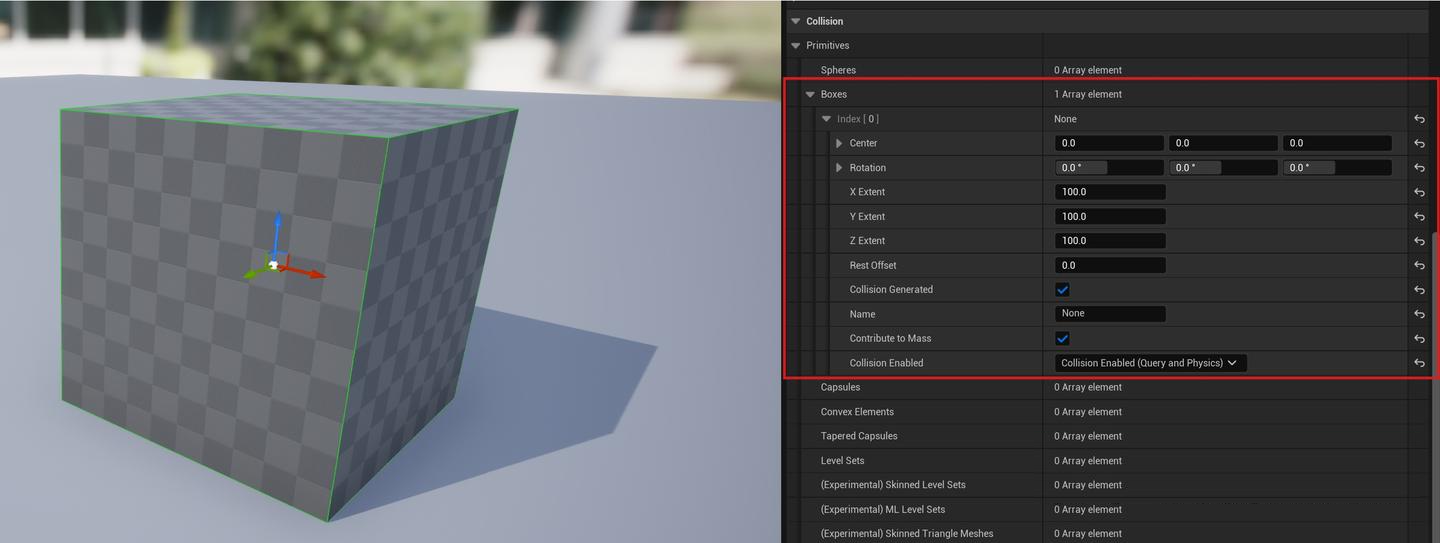
UBodySetup
这些碰撞配置,最终会存储到UBodySetup类里,作为资源的一部分,它会是StaticMesh的一个配置项。对于例子中添加的简单几何体碰撞,存储在其AggGeom变量中。
class UBodySetup : public UBodySetupCore
{
//...
/** Simplified collision representation of this */
UPROPERTY(EditAnywhere, Category = BodySetup, meta=(DisplayName = "Primitives", NoResetToDefault))
struct FKAggregateGeom AggGeom;
//...
};
AggGeom里是一大串几何体的数据,Box就位于BoxElems数组里。
struct FKAggregateGeom
{
GENERATED_USTRUCT_BODY()
UPROPERTY(EditAnywhere, editfixedsize, Category = "Aggregate Geometry", meta = (DisplayName = "Spheres", TitleProperty = "Name"))
TArray<FKSphereElem> SphereElems;
UPROPERTY(EditAnywhere, editfixedsize, Category = "Aggregate Geometry", meta = (DisplayName = "Boxes", TitleProperty = "Name"))
TArray<FKBoxElem> BoxElems;
UPROPERTY(EditAnywhere, editfixedsize, Category = "Aggregate Geometry", meta = (DisplayName = "Capsules", TitleProperty = "Name"))
TArray<FKSphylElem> SphylElems;
UPROPERTY(EditAnywhere, editfixedsize, Category = "Aggregate Geometry", meta = (DisplayName = "Convex Elements", TitleProperty = "Name"))
TArray<FKConvexElem> ConvexElems;
UPROPERTY(EditAnywhere, editfixedsize, Category = "Aggregate Geometry", meta = (DisplayName = "Tapered Capsules", TitleProperty = "Name"))
TArray<FKTaperedCapsuleElem> TaperedCapsuleElems;
UPROPERTY(EditAnywhere, editfixedsize, Category = "Aggregate Geometry", meta = (DisplayName = "Level Sets", TitleProperty = "Name"))
TArray<FKLevelSetElem> LevelSetElems;
UPROPERTY(EditAnywhere, editfixedsize, Category = "Aggregate Geometry", meta = (DisplayName = "(Experimental) Skinned Level Sets", TitleProperty = "Name"), Experimental)
TArray<FKSkinnedLevelSetElem> SkinnedLevelSetElems;
UPROPERTY(EditAnywhere, editfixedsize, Category = "Aggregate Geometry", meta = (DisplayName = "(Experimental) ML Level Sets", TitleProperty = "Name"), Experimental)
TArray<FKMLLevelSetElem> MLLevelSetElems;
UPROPERTY(EditAnywhere, editfixedsize, Category = "Aggregate Geometry", meta = (DisplayName = "(Experimental) Skinned Triangle Meshes", TitleProperty = "Name"), Experimental)
TArray<FKSkinnedTriangleMeshElem> SkinnedTriangleMeshElems;
};
UPrimitiveComponent
UPrimitiveComponent为所有持有几何物体的基类,StaticMeshComponent也是它的子类。会创建一个FBodyInstance作为其在物理世界中的代表。无论是UStaticMeshComponent还是USkeletalMeshComponent又或者UCapsuleComponent,实际最终都会通过FBodyInstance与物理世界进行交互。此外还有UGeometryCollectionComponent等用于特定物理功能相关的Component,它们会持有额外的物理代理。
FBodyInstance
一个物理对象的实例,在Gameplay部分的表示,用于设置物理相关的各项属性。引擎代码注释中对FBodyInstance的定义如下:
Container for a physics representation of an object
一些属性举例:
- TWeakObjectPtr
BodySetup:关联的BodySetup,BodyInstance本身并不包含具体的几何形状。 - FBodyInstance* WeldParent:一个BodyInstance所连接的父Body。
- FPhysicsActorHandle ActorHandle:实际是FSingleParticlePhysicsProxy*,为物理引擎内部BodyInstance的呈现与代理。
- FName CollisionProfileName:碰撞的ProfileName。
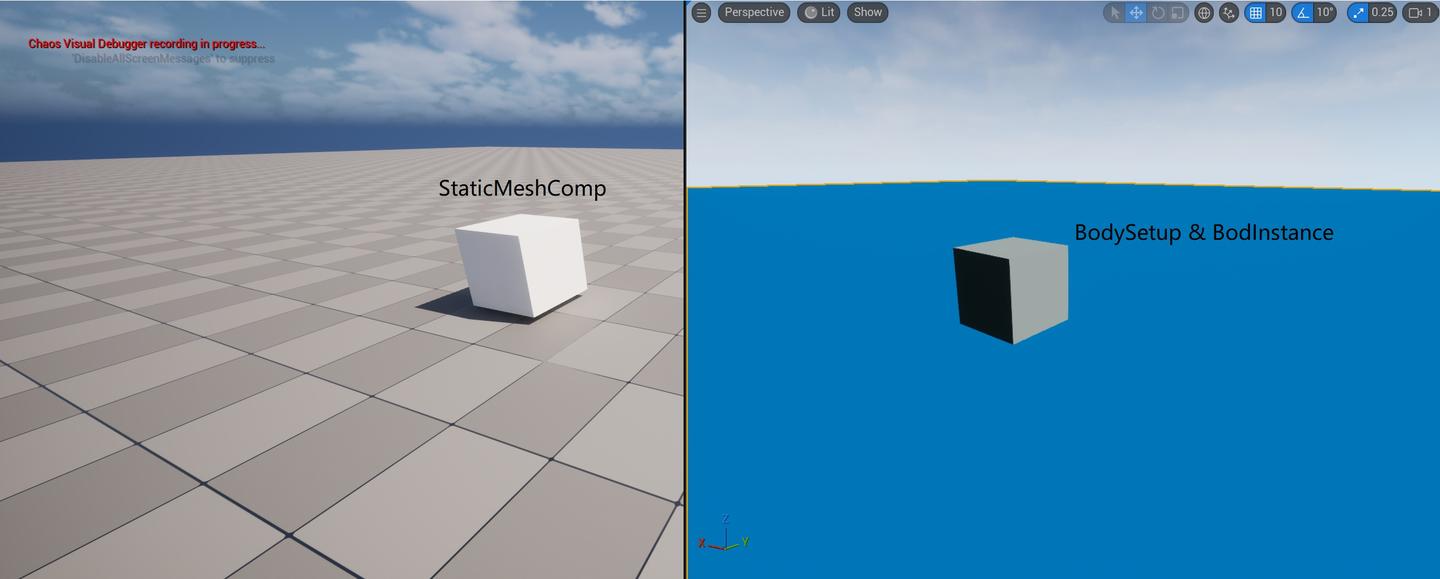
至此,StaticMeshComponent创建完毕,其包含了BodyInstance,并关联了BodySetup。
简单理解的话,StaticMeshComponent包含了Render和物理信息,而BodySetup+BodyInstance就表示物理信息。
物理对象与Shape
直观理解,物理世界就是大量的形状构成的。
物理世界如何表示"对象"
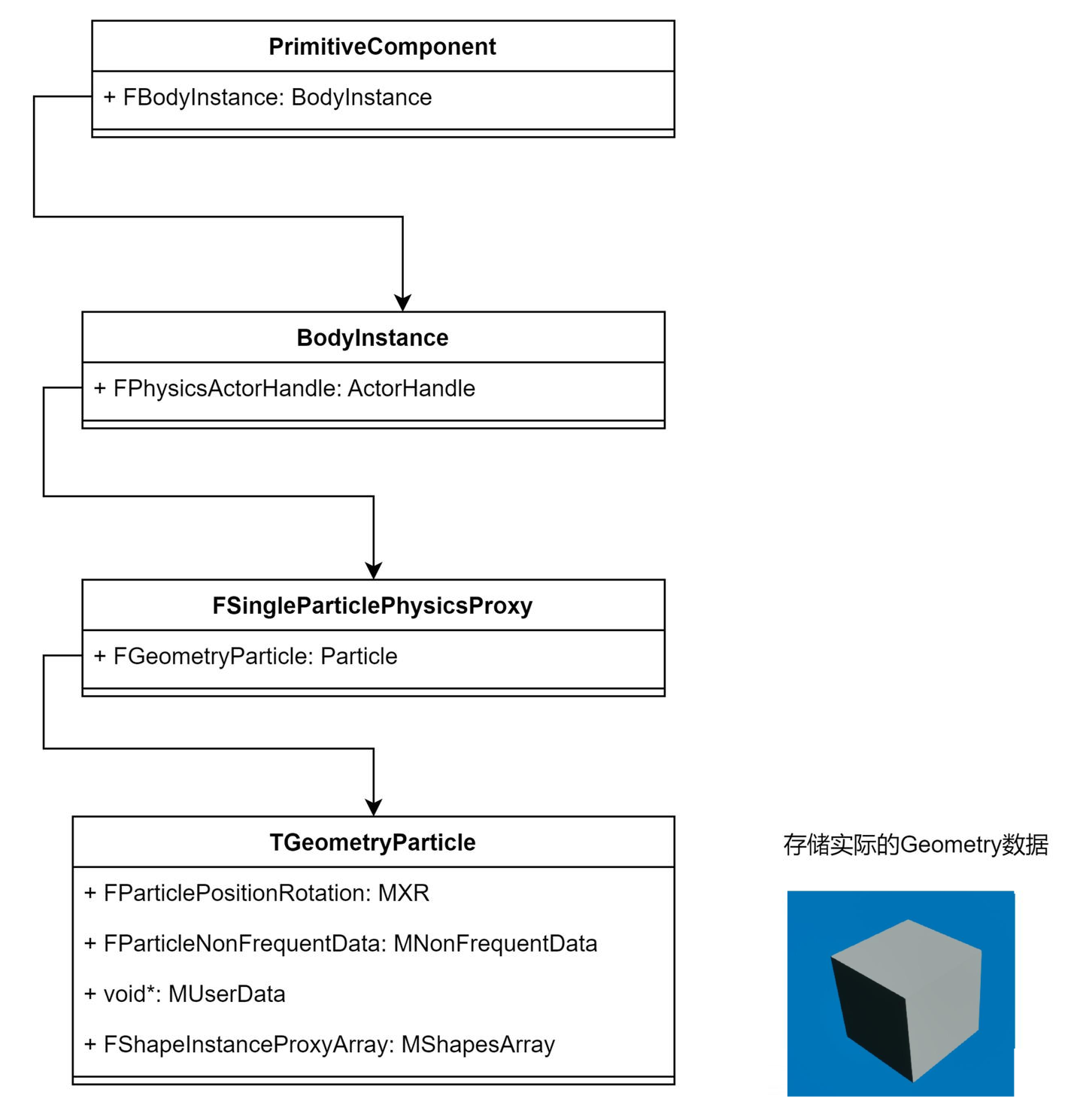
Game世界使用Actor、Component等类型来表示一个对象,但物理世界只关注一个物体的几何形状、位置、以及质量等属性,它们构成了另一套PhysScene里的数据结构,以及PhysScene里的“对象”。这个对象称为GeometryParticle,Game世界通过FPhysicsActorHandle类型来索引它。
FPhysicsActorHandle
using FPhysicsActorHandle = Chaos::FSingleParticlePhysicsProxy*;
看声明代码,等价于FSingleParticlePhysicsProxy*,既然叫XXProxy,那就是一个代理的作用。一个需要进行物理解算的对象在物理引擎内被称为一个Particle,是一个约定俗成的名字,该类作为其代理充当与物理交互的接口。物理引擎只关注一个物体的几何形状、位置、以及质量等属性,它们由TGeometryParticle持有。PhysicsActorHandle的TGeometryParticleHandle属性指向了GeometryParticle,实现关联。不仅如此,TGeometryParticle内部还有一个指向更底层物理SOA存储的FGeometryParticleHandle,暂时用不到,先不管。概念比较多,之后会做总结。
注意,目前都只涉及物理世界,但不涉及物理线程。游戏线程和物理线程都可以读写物理世界,但物理线程主要负责物理模拟。
除此之外还有描述Chaos破坏集合的FGeometryCollectionPhysicsProxy、描述关节约束的FJointConstraintPhysicsProxy等。
FSingleParticlePhysicsProxy的属性:
TUniquePtr<PARTICLE_TYPE> Particle;
FParticleHandle* Handle;
FPhysicsObjectUniquePtr Reference;
int32 GravityGroupIndex;
TUniquePtr<FProxyInterpolationBase> InterpolationData;
GetGameThreadAPI()是GameThread获取操作类的方法,直接cast即可:
FORCEINLINE FRigidBodyHandle_External& GetGameThreadAPI()
{
return (FRigidBodyHandle_External&)*this;
}
UPrimitiveComponent::OnCreatePhysicsState
用于创建物理数据。Component在创建时会执行RegisterComponent函数,其中执行到OnCreatePhysicsState创建物理数据,OnCreatePhysicsState本身是虚函数,可以被PrimitiveComponent的不同子类重载。
重载了OnCreatePhysicsState的Component:
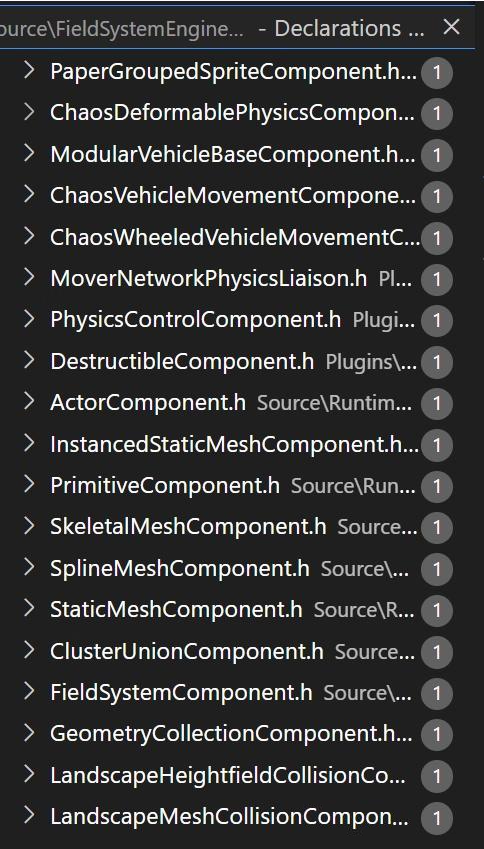
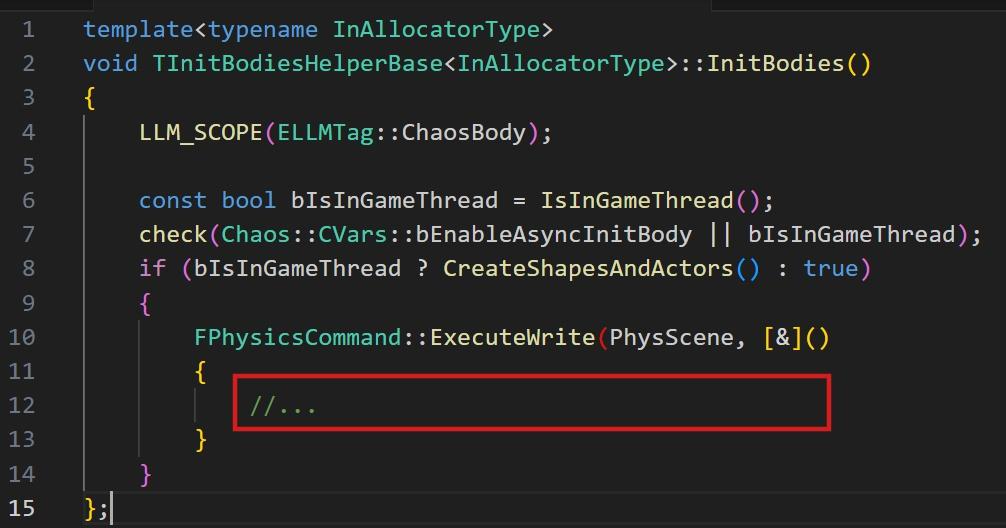
而其中主要逻辑都在FBodyInstance::InitBody函数里,最终执行到FInitBodiesHelperBase::InitBodies。
UPrimitiveComponent和FPhysicsActorHandle的映射
给UPrimitiveComponent创建完物理对象后,和PhysicsActorHandle的映射关系会存储在PhysScene里,用于后续查询。
值得注意的是,Component和PhysicsActorHandle是个一对多的关系,比如一个Component里面可以创建多个BodyInstance,自然就有了多个PhysicsActorHandle。
一个例子是SkeletalMeshComponent,会有多个刚体组成。
/** Array of FBodyInstance objects, storing per-instance state about about each body. */
TArray<struct FBodyInstance*> Bodies;

创建Actor(Particle)
这里Actor是PhysX遗留的术语,可以视为物理场景中的一个对象,基本等价于Particle,也即前文的TGeometryParticle。这里的Particle和下文的Shapes都在CreateShapesAndActors函数中创建。
最终的创建代码如下,StaticMesh情况比较简单,直接创建TGeometryParticle即可:
void FChaosEngineInterface::CreateActor(const FActorCreationParams& InParams,FPhysicsActorHandle& Handle, UObject* InOwner)
{
TUniquePtr<FGeometryParticle> Particle;
// Set object state based on the requested particle type
if(InParams.bStatic)
{
Particle = FGeometryParticle::CreateParticle();
Particle->SetResimType(EResimType::ResimAsFollower);
}
//...
}
TGeometryParticle的属性如下:
TChaosProperty<FParticlePositionRotation, EChaosProperty::XR> MXR;
TChaosProperty<FParticleNonFrequentData,EChaosProperty::NonFrequentData> MNonFrequentData;
void* MUserData;
FShapeInstanceProxyArray MShapesArray;
EParticleType Type;
FDirtyChaosPropertyFlags MDirtyFlags;
MXR:表示位置和旋转;FVec3 MX;FRotation3f MR;MShapesArray是Particle所包含的Shape,一个GeometryParticle完全可以包含多个形状,如球、长方体等,只是用的不多。
MNonFrequentData指向了低频访问的数据。
有了Particle,随之就能创建PhysicsActorHandle了,把刚创建的FGeometryParticle指针存入即可。
创建不同形状的Shape
Shape为一个几何体,它包含碰撞、几何与物理材质等数据,一个Particle可以有多个Shape。
Shape的形状描述都在AggGeom里,总共有以下几种基础形状:
Sphere:对应几何类为TSPhere,记录了圆心坐标和半径。

Box:对应几何类为TBox,记录了Box的HalfExtent和中心Transform。
Capsule:对应类型为FCapsule,照理说应该记录HalfHeight、Radius和中心Transform,但小小优化了一下,改为记录圆柱体上下两个点+Radius。

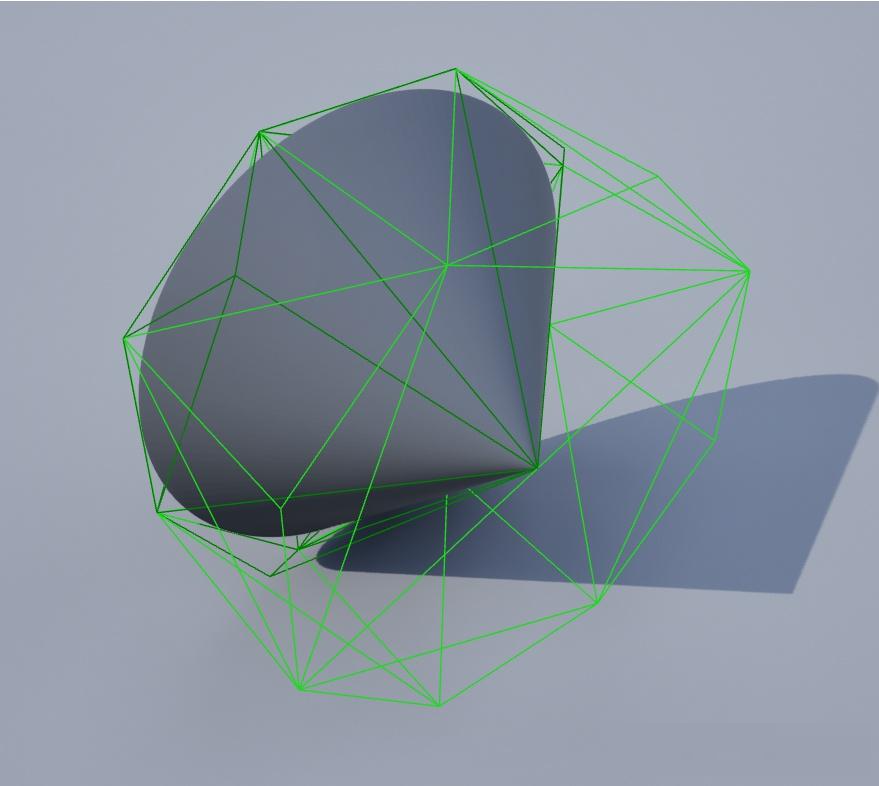
Convex:除了这些基础形状,还有能处理任意形状的凸包,对应类型为FConvex,里面存储了所有顶点数据,是三角形的集合。下图是为一个锥体生成的凸包。
这里例子的StaticMesh只配置了Box类型的碰撞,会创建TBox类型的Geometry,包含了Min和Max两个坐标,其实就是HalfExtend的作用。
template<class T, int d>
class TBox final : public FImplicitObject
{
TAABB<T, d> AABB;
};
class TAABB
{
TVector<T, d> MMin, MMax;
};
然后对TBox再包一下,加上Box的Transform数据,生成ImplicitObjectTransformed对象。

ChaosInterface::CreateGeometry函数负责根据配置的AggGeom数据,创建Geometry实例,然后存入Particle中。

至此,示例中StaticMesh对应的物理Geometry已创建完毕。
Simple Collision & Complex Collision
通常一个对象会有简单&复杂两套碰撞,就需要分别创建两个Shape和Geometry。勾选UseSimpleAsComplex则只用一套,但不建议这么做。

把上面几个类都联系起来,总结关系如下。
写入物理世界
目前为止,只是创建了Particle、Shape等数据,还需要把它们注册到物理世界中,就像把Actor注册到UWorld。
FChaosScene::AddActorsToScene_AssumesLocked
物理世界写锁
首先物理世界会被多线程同时读取与写入,因此是个读写锁的场景,写入时需要加写锁,通过FPhysicsCommand::ExecuteWrite函数实现,执行到这时可能会阻塞在等待锁上。
写入Solver
Solver即为FPBDRigidsSolver,管理了物理世界所有Particle,如此理解即可,写入代码如下:
FPBDRigidsSolver::RegisterObject
RigidBody_External.SetUniqueIdx(GetEvolution()->GenerateUniqueIdx());
TrackGTParticle_External(*Proxy->GetParticle_LowLevel()); //todo: remove this
Proxy->SetSolver(this);
Proxy->GetParticle_LowLevel()->SetProxy(Proxy);
AddDirtyProxy(Proxy);
UpdateParticleInAccelerationStructure_External(Proxy->GetParticle_LowLevel(), EPendingSpatialDataOperation::Add);
然后Particle会被赋予一个UniqueIdx作为标识。
RigidBody_External.SetUniqueIdx(GetEvolution()->GenerateUniqueIdx());
写入空间加速结构
这是一个重点。物理世界中有大量的几何体,为了支持射线检测、碰撞查询、物理模拟等功能,必然要用到空间加速结构。这就是FChaosScene类中的SolverAccelerationStructure属性。
Chaos::ISpatialAccelerationCollection<Chaos::FAccelerationStructureHandle, Chaos::FReal, 3>* SolverAccelerationStructure;
虽然是一个Interface,但实际都用的是:

它只是一个Collection,里面划分了多个底层的加速结构。Chaos的默认底层加速结构为AABBTree,它是一个类似BVH的数据结构,但实现更简单。
为什么要划分多个AABBTree?
整个物理场景使用一个超大的AABBTree来管理并不合适,元素多了效率会很低。所以分多个AABBTree子树是合理的,划分依据并不是空间远近,而是Particle的Static/Movable属性、QueryOnly/QueryAndPhysics属性等,大方向是划分了Static Tree和Dynamic Tree。因为Static Tree是很少做更新的,Particle移动时,更新单独的Dynamic Tree效率更高。Particle的SpatialAccelerationIdx属性就表示它属于哪一个AABBTree,有16位,能表示8个Bucket,每个Bucket又有最多8192个AABBTree,但目前远没有用这么多,实际默认用了四个,最多能支持到8个。
struct FSpatialAccelerationIdx
{
uint16 Bucket : 3;
uint16 InnerIdx : 13;
}
Bucket的划分
对于Bucket的划分,只有两种,一个是0,即默认的,另一个是1,当AABB的包围盒过大时会放到Bucket 1里。这个包围盒阈值默认为100米。

在FPBDRigidsSolver::RegisterObject函数中,会根据这个条件设置Bucket。

为什么超大AABB要单独划分?如果超大Particle和小Particle存储在一棵树中,会导致查询效率变低。想象一个叶节点包含了一个超大Particle和若干小Particle,那么做射线检测时,很容易与这个叶节点相交,但做逐Particle判断时,大概率只和这个超大Particle相交,小Particle的射线检测就都浪费了。
InnerIndex的设置
查看FChaosEngineInterface::CreateActor代码,会发现根据Particle的Static/Dynamic,以及是否QueryOnly,分成了四类:

Defautl是Static Tree,Dynamic是Dynamic Tree。
Static Tree会存储静态对象,如场景中的树木、石头、房屋等。
例子中,Box的属性是Static+QueryOnly,因此InnerIndex被设置成了ESpatialAccelerationCollectionBucketInnerIdx::DefaultQueryOnly。

Dynamic Tree存储会移动的对象,如角色、载具、电梯。
DefaultQueryOnly是对Static Tree再细分出Query Only的Particle,DynamicQueryOnly类似,但目前没启用,通过p.Chaos.AccelerationStructureIsolateQueryOnlyObjects参数开启。
通过Bucket和InnerIndex划分AABBTree的示意图如下:
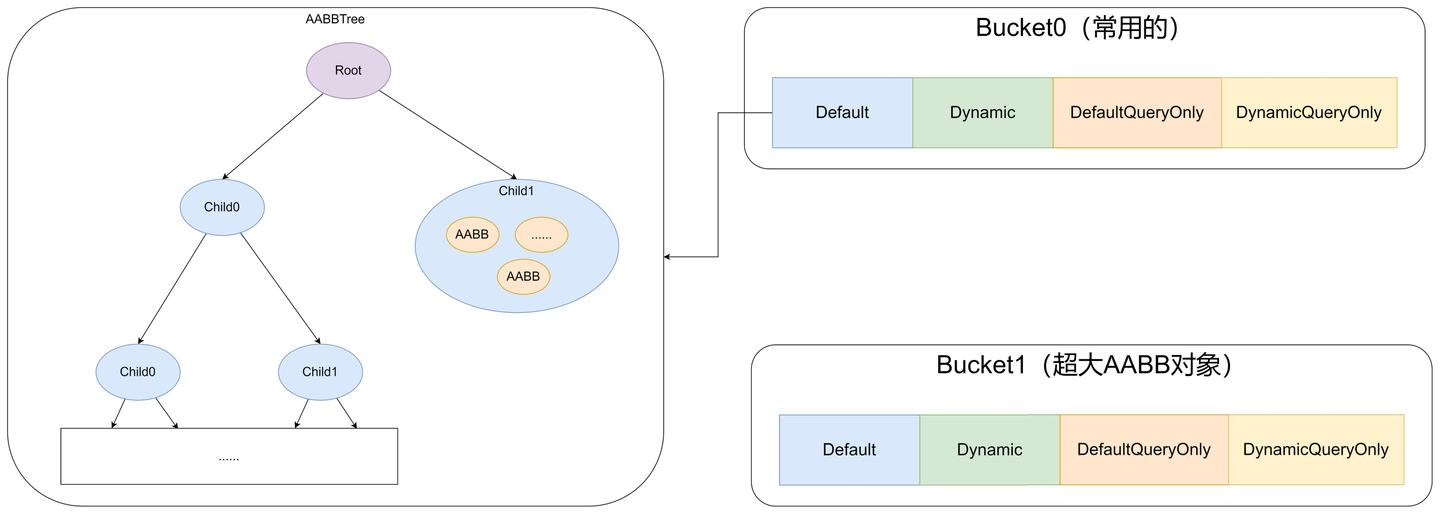
例子中,Box的属性是Static+QueryOnly,因此InnerIndex被设置成了DefaultQueryOnly。
具体写入了什么数据
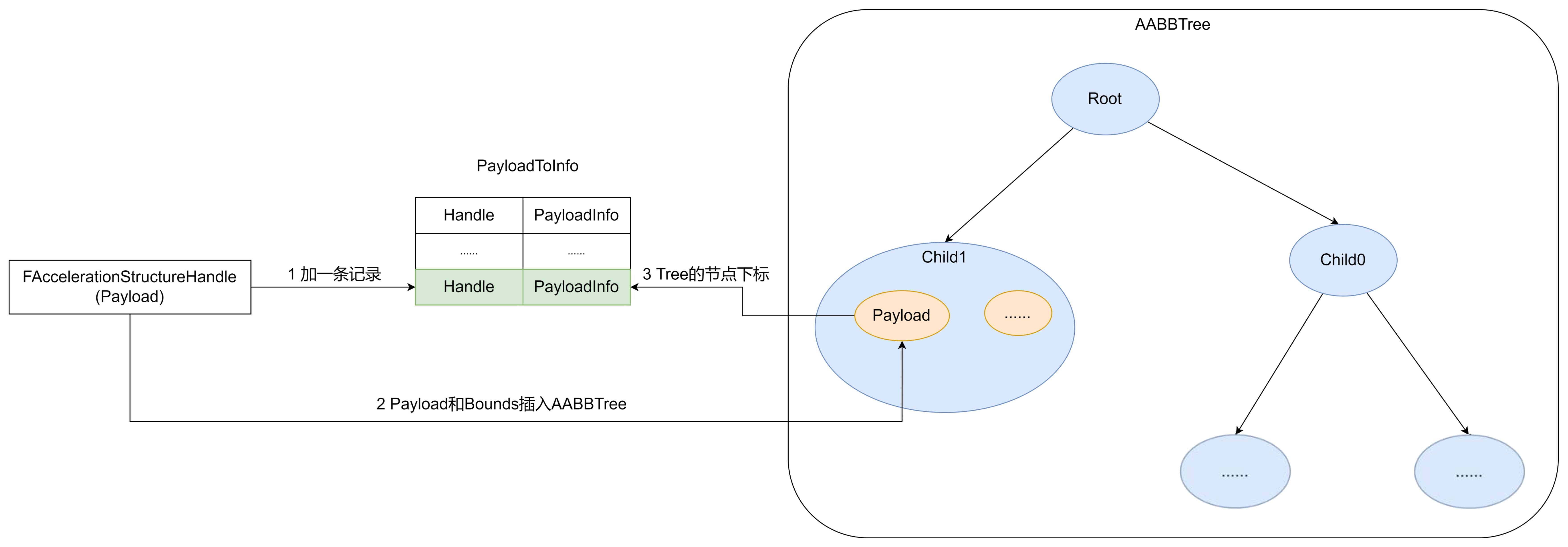
这里立即更新物理世界的加速结构,UpdateElement就是把Geometry插入到AABB中。
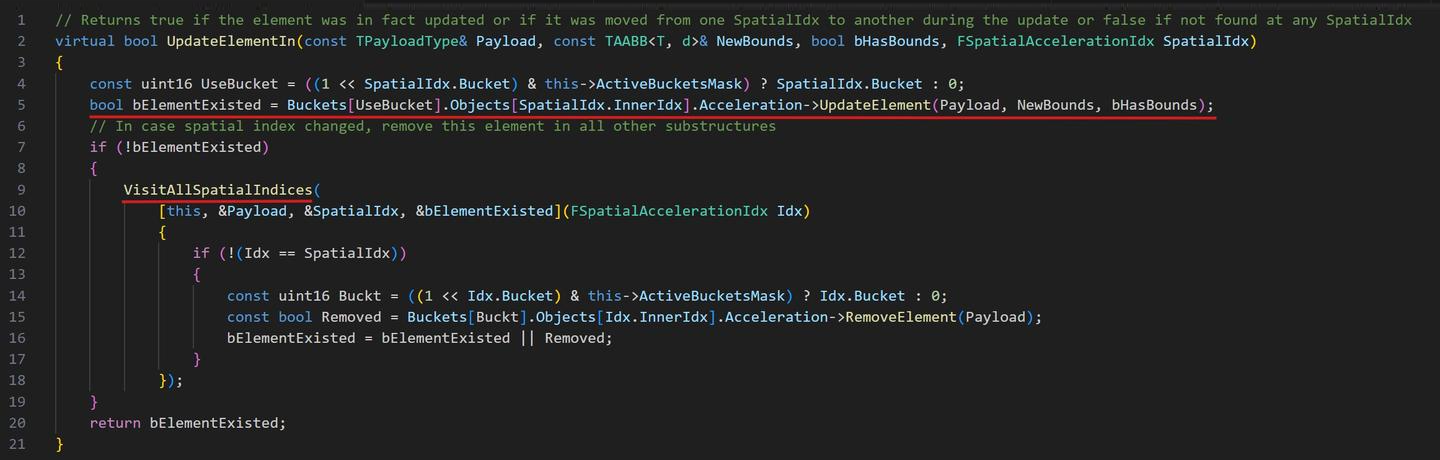
写入数据有Payload和PayloadInfo两部分。
Payload更像Key,类型是FAccelerationStructureHandle,包含Particle指针、UniqueIdx、FilterData等数据。
PayloadInfo是AABBTree叶节点真正存储的数据,能反向关联到Payload和Particle,类型为FAABBTreePayloadInfo。属性如下:
struct FAABBTreePayloadInfo
{
int32 GlobalPayloadIdx; // GlobalPayloads里单独存的NodeIndex,没有BoundingBox
int32 DirtyPayloadIdx; // 单独的DirtyElementTree里的NodeIdx
int32 LeafIdx; // 常见情况,Leaf Node的Index
int32 DirtyGridOverflowIdx; // 用Dirty Grid而不是DirtyElementTree时,overflow的Index,少见情况
int32 NodeIdx; // 常见情况,Tree Node的Index
}
最终Payload和PayloadInfo会存在PayloadToInfo这个Map里,其实是个数组,通过UniqueIndex索引,模拟成了Map。
typename StorageTraits::PayloadToInfoType PayloadToInfo;
AABBTree
既然AABBTree加速结构很重要,不妨展开分析下。
核心思想
其实和BVH类似,都是把一群AABB包围盒,通过启发式的规则,不断划分成左右两个AABB子树,直到每个叶节点包含的AABB包围盒少于一个阈值,本质是一棵二叉树。
以2D情况为例,AABB树的非叶节点,会把叶节点的AABB给取并集,作为自己的AABB,叶子节点则包含了一定数量的AABB对象。下面Root的Child1节点就是叶子节点。
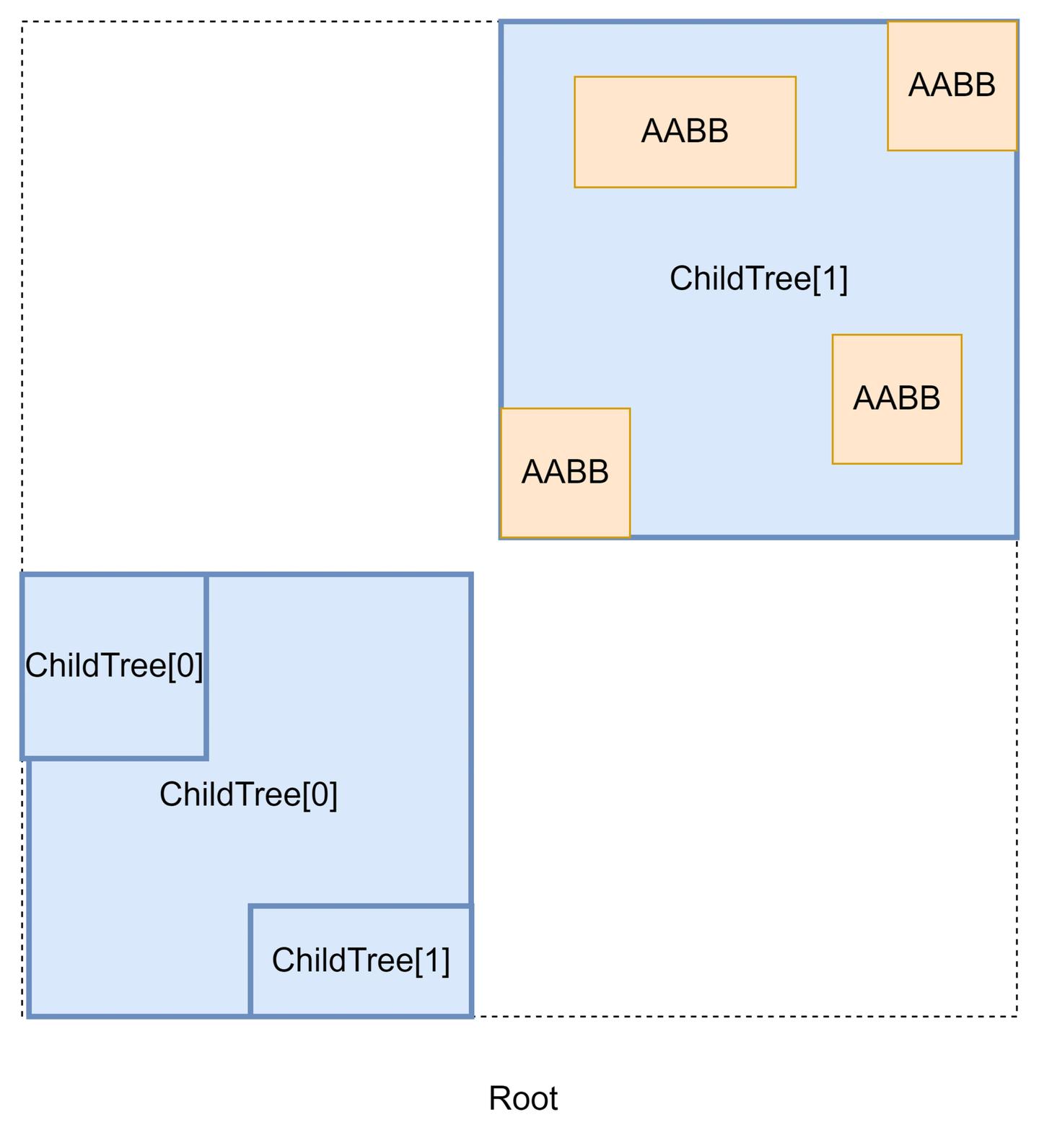
其对应的二叉树结构如下:
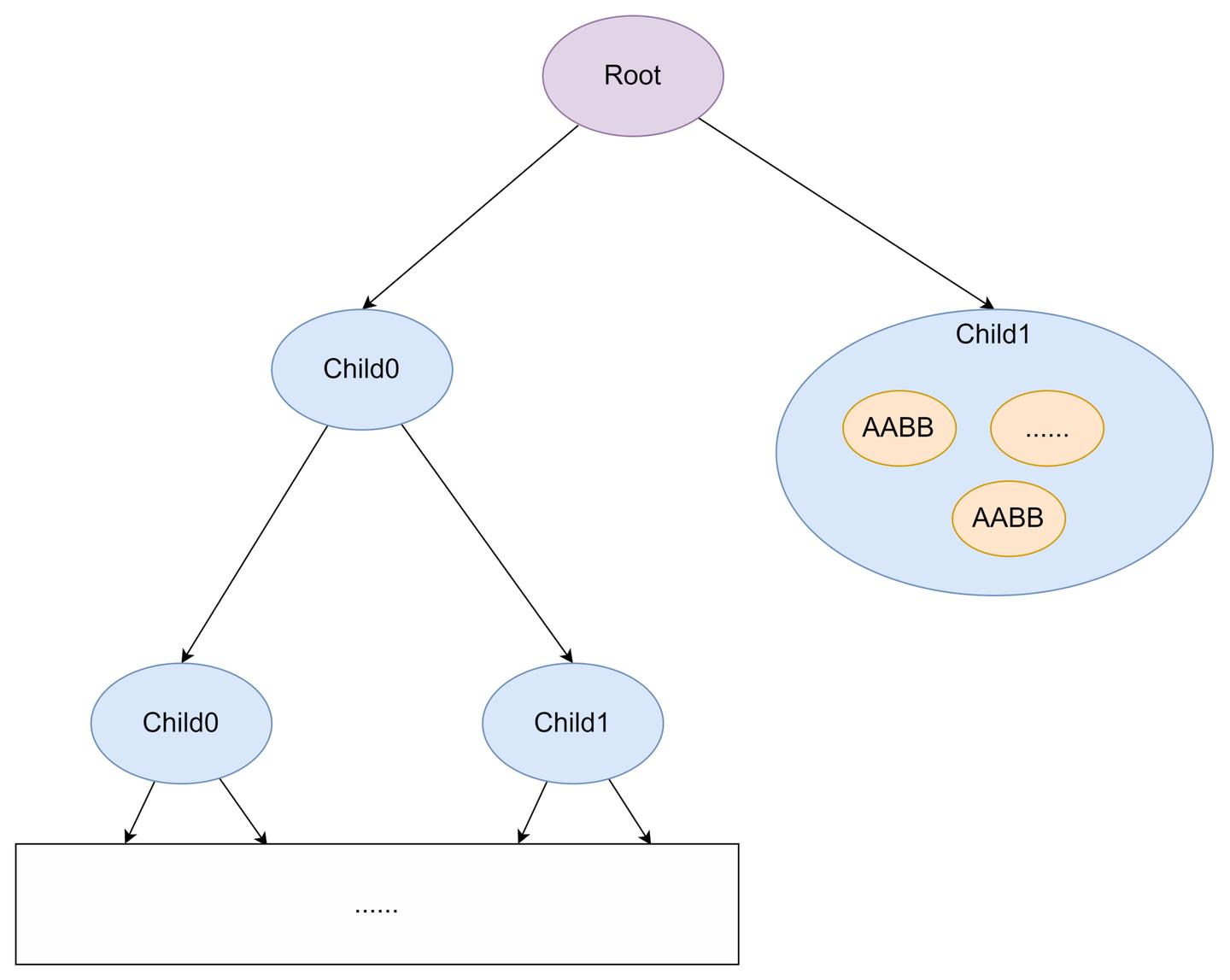
至于AABBTree的具体代码实现,为了效率,没有使用动态new节点的方法,而是用数组来表示了二叉树的拓扑。
TArray<FNode> Nodes;
TLeafContainer<TLeafType> Leaves;
Nodes存储了所有节点,每个节点如下:
struct TAABBTreeNode
{
TAABB<T, 3> ChildrenBounds[2];
int32 ChildrenNodes[2];
int32 ParentNode;
bool bLeaf : 1;
bool bDirtyNode : 1;
};
当Node是叶节点时,ChildrenNodes[
ChildrenBounds是左右子节点的Bounds。
TAABBTreeLeafArray
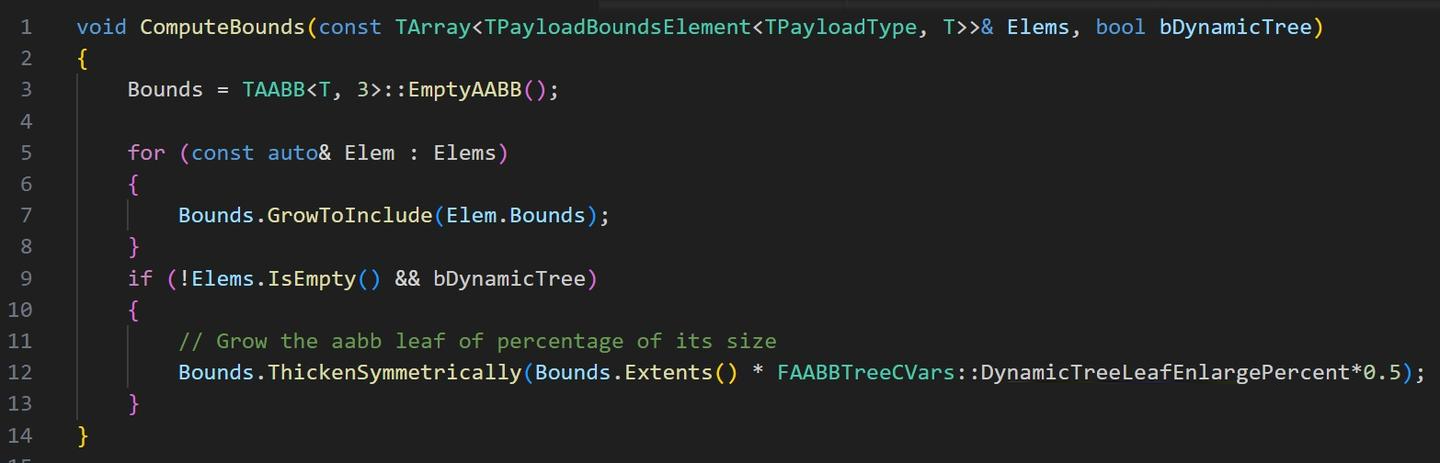
TArray<TPayloadBoundsElement<TPayloadType, T>> Elems;
叶子节点数组只存储AABB包围盒,会略微扩大一点,DynamicTreeLeafEnlargePercent=0.1,为了给Update做一点开销缓冲,避免Update太频繁。
叶节点包含最多8个AABB包围盒,叶节点的Bounds是它们的并集。
8是默认值,也可以通过CVar参数改变:
int32 FAABBTreeCVars::DynamicTreeLeafCapacity = 8;
FAutoConsoleVariableRef FAABBTreeCVars::CVarDynamicTreeLeafCapacity(TEXT("p.aabbtree.DynamicTreeLeafCapacity"), FAABBTreeCVars::DynamicTreeLeafCapacity, TEXT("Dynamic Tree Leaf Capacity"));
直接向叶节点插入元素
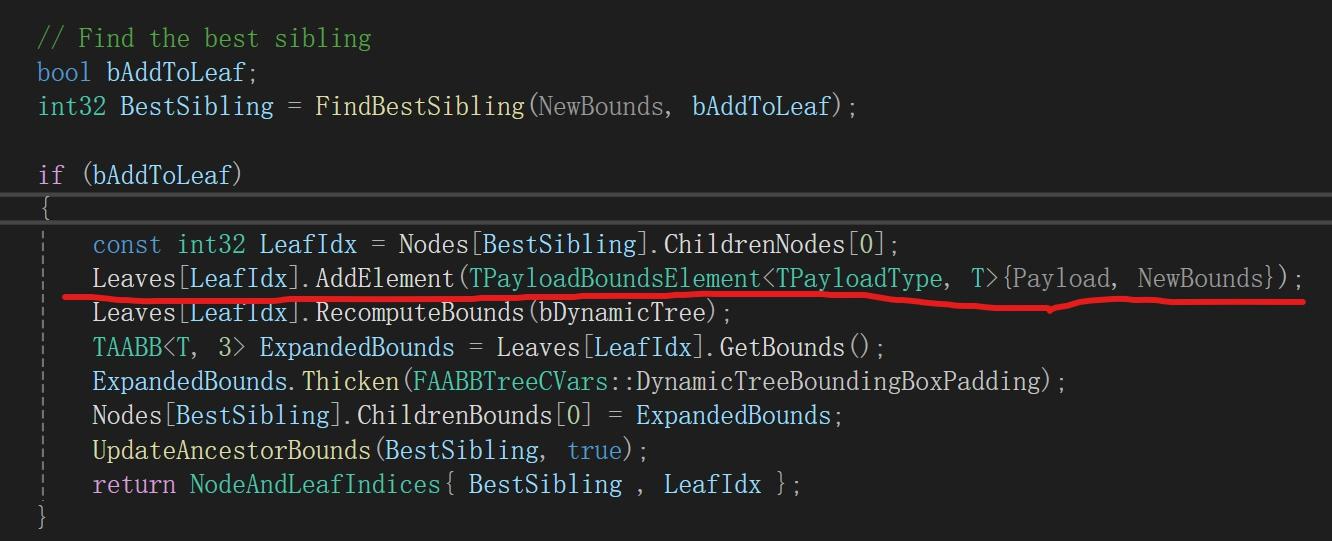
InsertLeaf
把Payload和Bounds插入到AABBTree中。简单起见,假设已经找到了最适配的那个叶节点,直接插入其中。
叶节点有个Elements数组,打包存储了Payload和Bounds,元素类型如下:
struct TPayloadBoundsElement
{
TPayloadType Payload;
TAABB<T, 3> Bounds;
};
具体代码层面的实现上,一个Leaf节点还需要一个额外的Node节点来辅助。
下图为AABBTree拓扑到实际存储结构的示例,可以看到树的叶节点,需要一个Node节点与一个Leaf节点来表示。
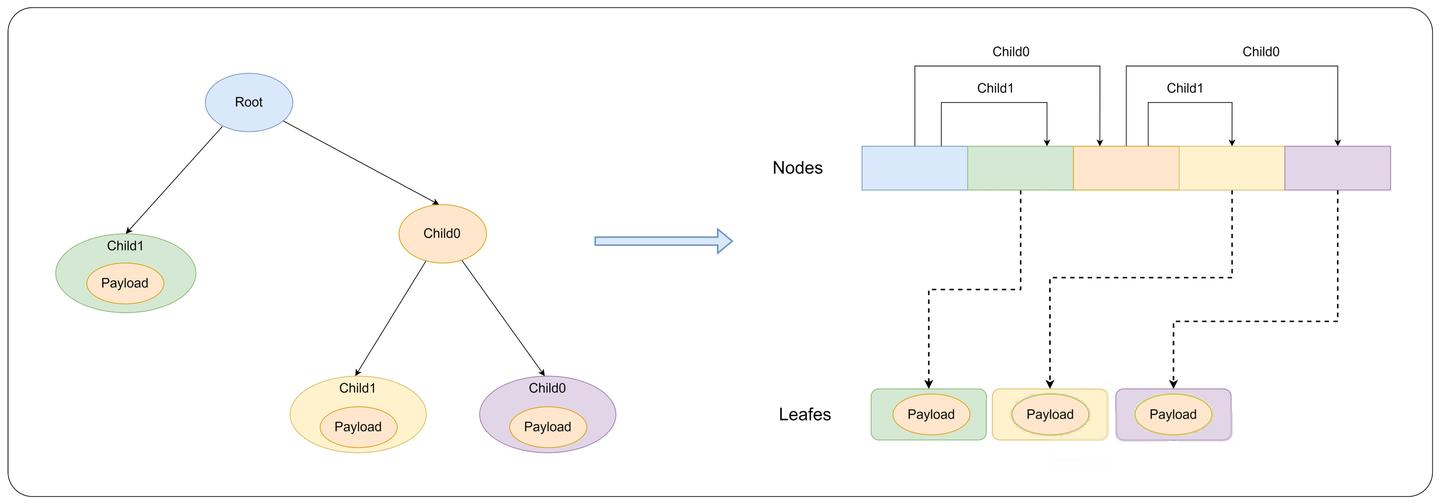
插入完成后,会返回Particle在AABBTree中的索引,索引由Node数组下标和Leaf数组下标两部分组成,类型是NodeAndLeafIndices。
struct NodeAndLeafIndices
{
int32 NodeIdx;
int32 LeafIdx;
};
然后这个数据就存储在之前的FAABBTreePayloadInfo中。
如何寻找最合适的叶节点
叶节点满了,新建一个Node,作为Parent。
FindBestSibling
如果一颗AABBTree层数较多,那么插入一个AABB包围盒时,需要寻找“最合适”的叶节点插入。
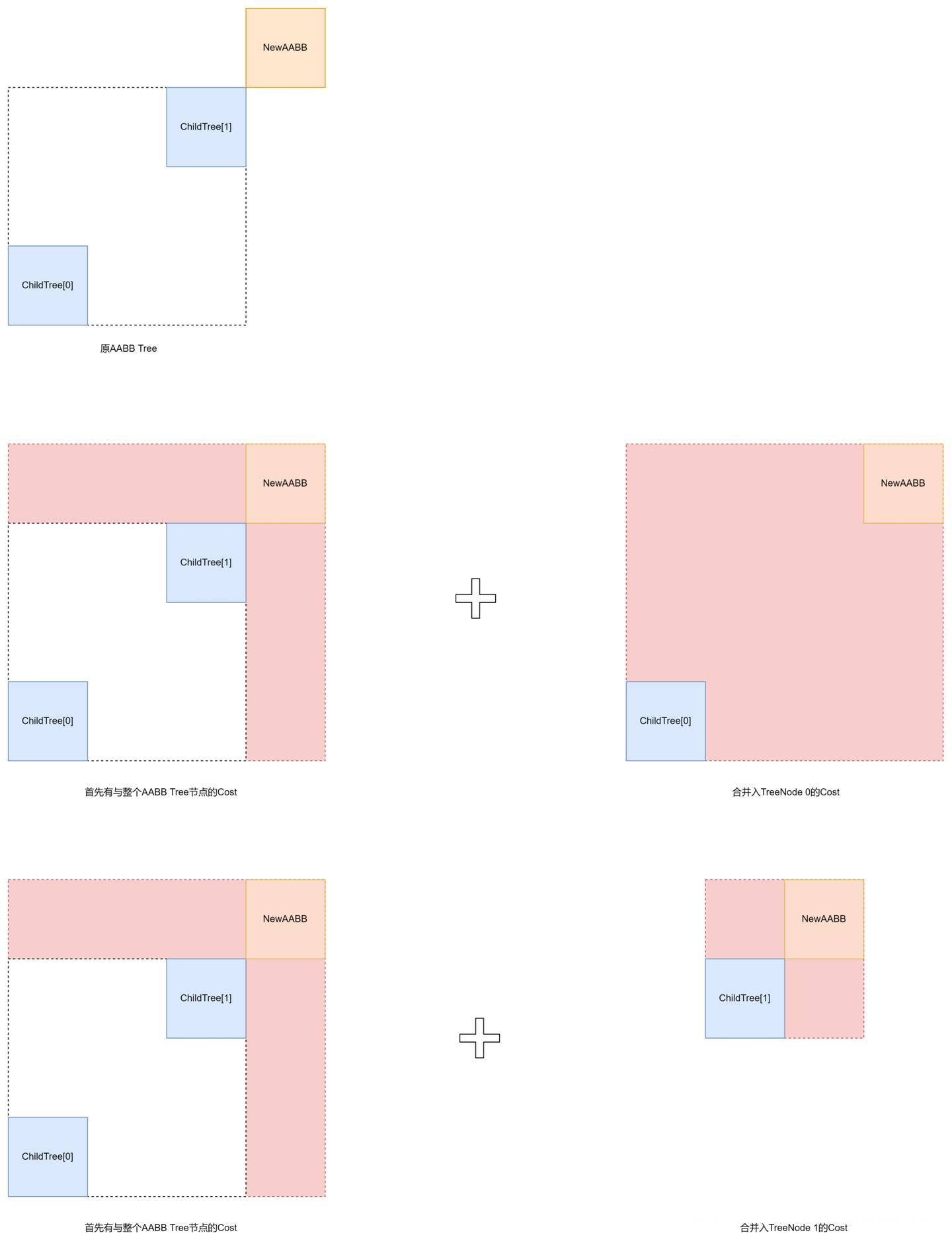
何谓“最合适”,加入新AABB,通常会使一些ChildNode的BoundingBox变大,需要使BoundingBox增加的体积尽量小,以此来判定“最合适”。这是一种启发式的方法,认为BoundingBox大小直接影响到AABBTree查询的效率,类似构建BVH使用的SAH表面积启发算法。这个寻找过程称为“FindBestSibling”。
下面看几个例子。
例子1,新加入AABB在原先AABBTree的BoundingBox之内。此时经过对比BoundingBox增加的体积,应该加入ChildTree[1]。

例子2,新加入AABB在原先AABBTree的BoundingBox之外。此时不仅要考虑分别加入ChildTree[
这里Root节点带来的增量相同,显然加入ChildTree[1]更合适。
例子3,多层子节点情况。看个更复杂的多层子节点例子,ChildTree[
对于ChildTree[
对于ChildTree[1]的两个子树,先要计算与ChildTree1产生的额外空间,再计算与两个子树的额外空间,最后都加起来。
因此这里显然应该把新节点加入ChildTree[
Leaf满了怎么办?
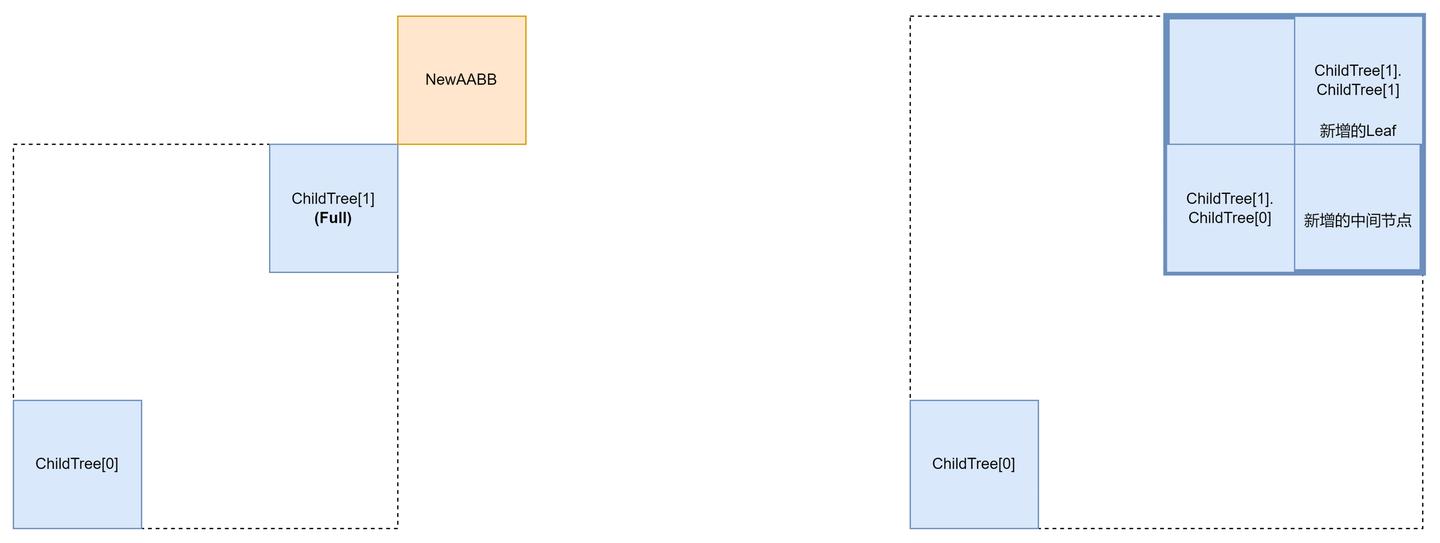
当BestSibling找到的叶节点已经满了,就无法直接添加,需要再新增两个Node,一个作为中间节点,另一个作为新的Leaf。之后同样要更新Leaf到根节点路径上所有Parent的BoundingBox。
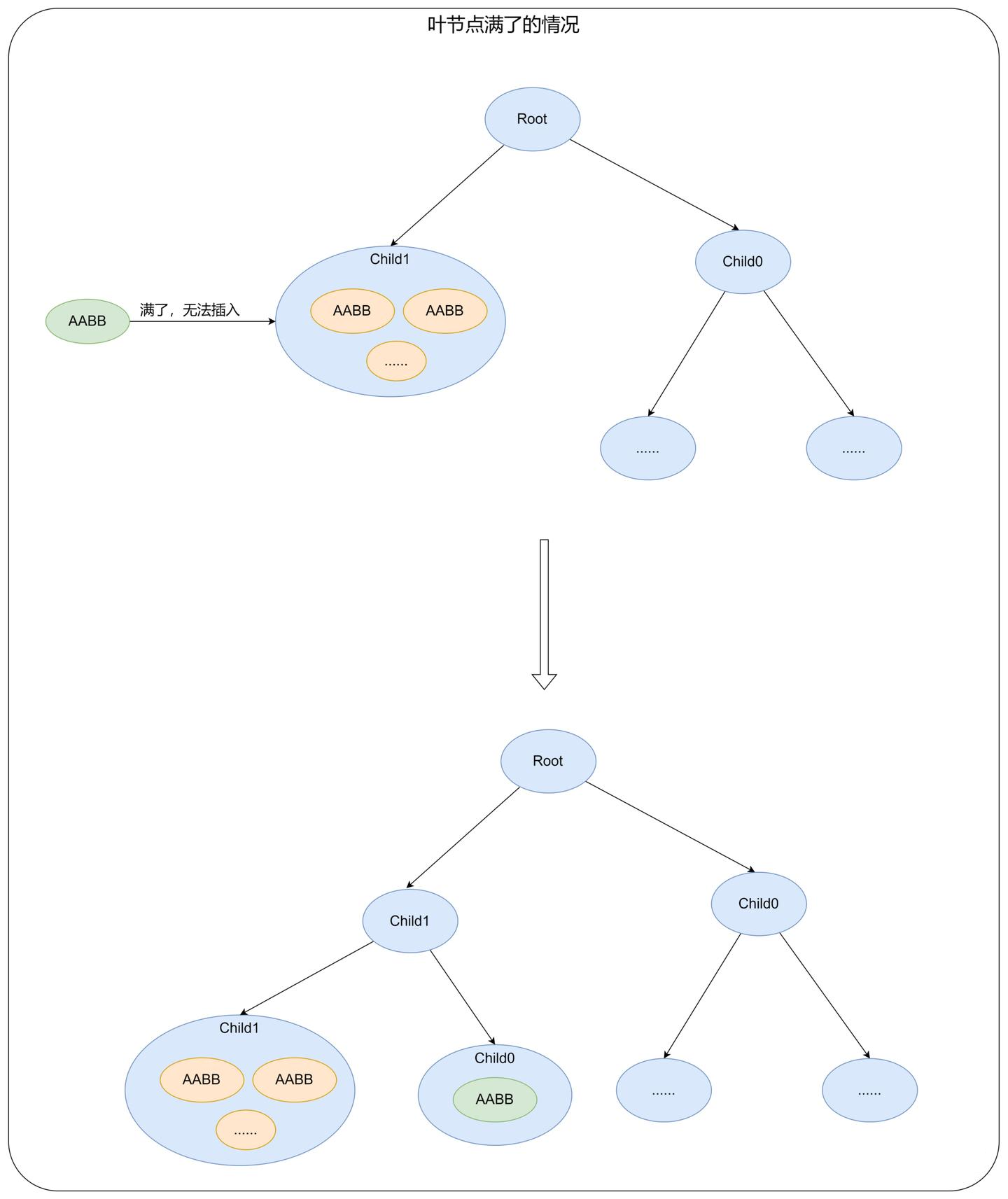
例子2的变体:
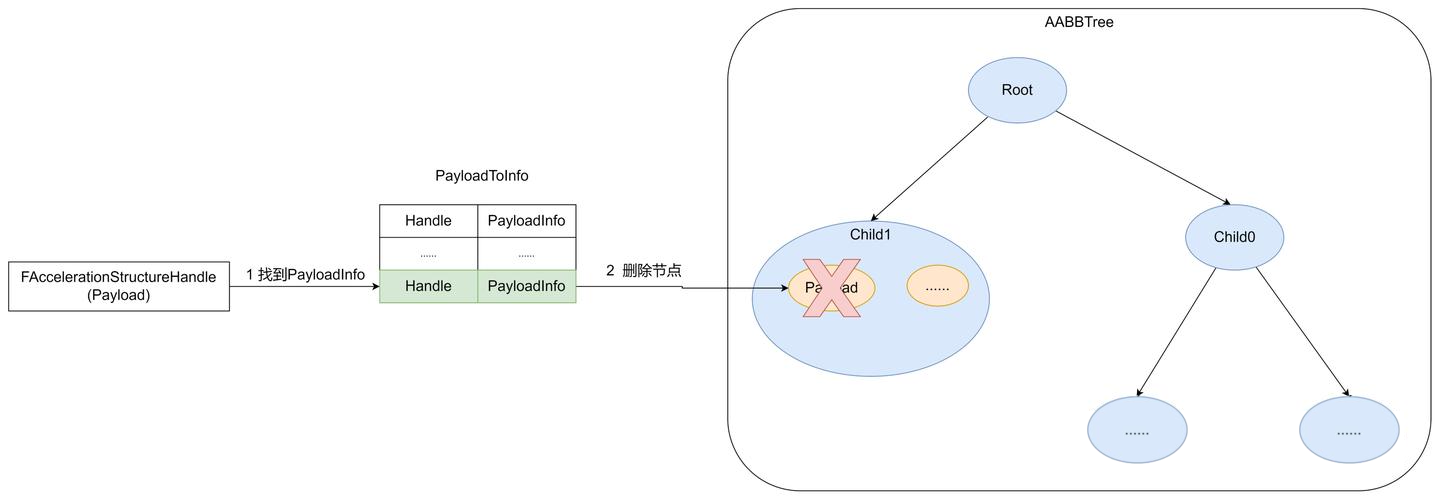
删除元素
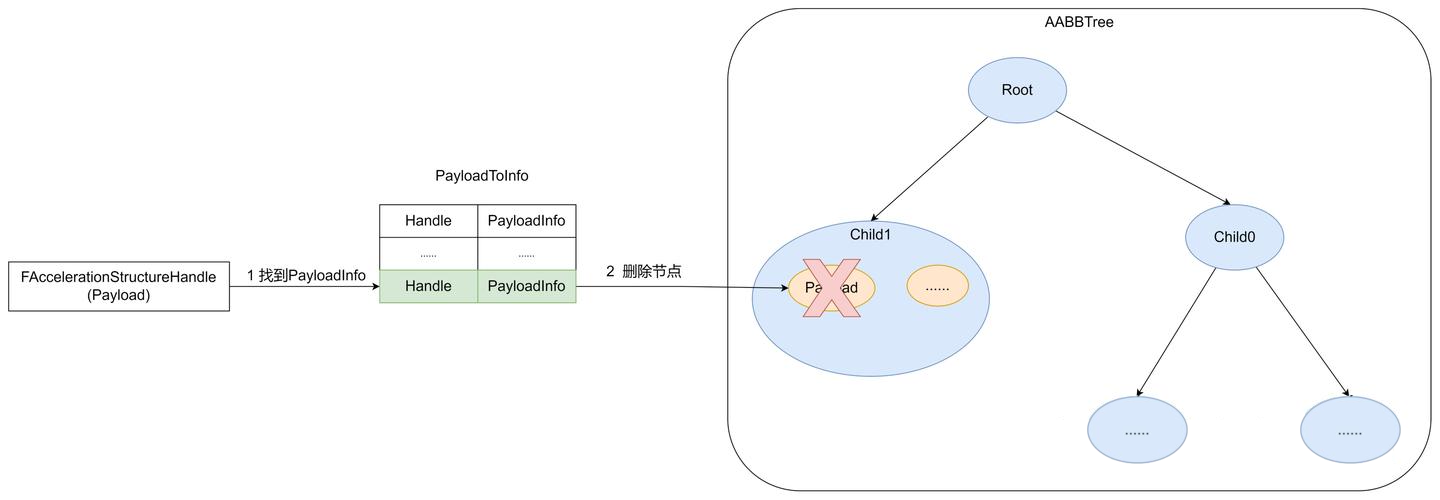
与插入元素对应的,就是删除元素了,删除逻辑会简单很多。
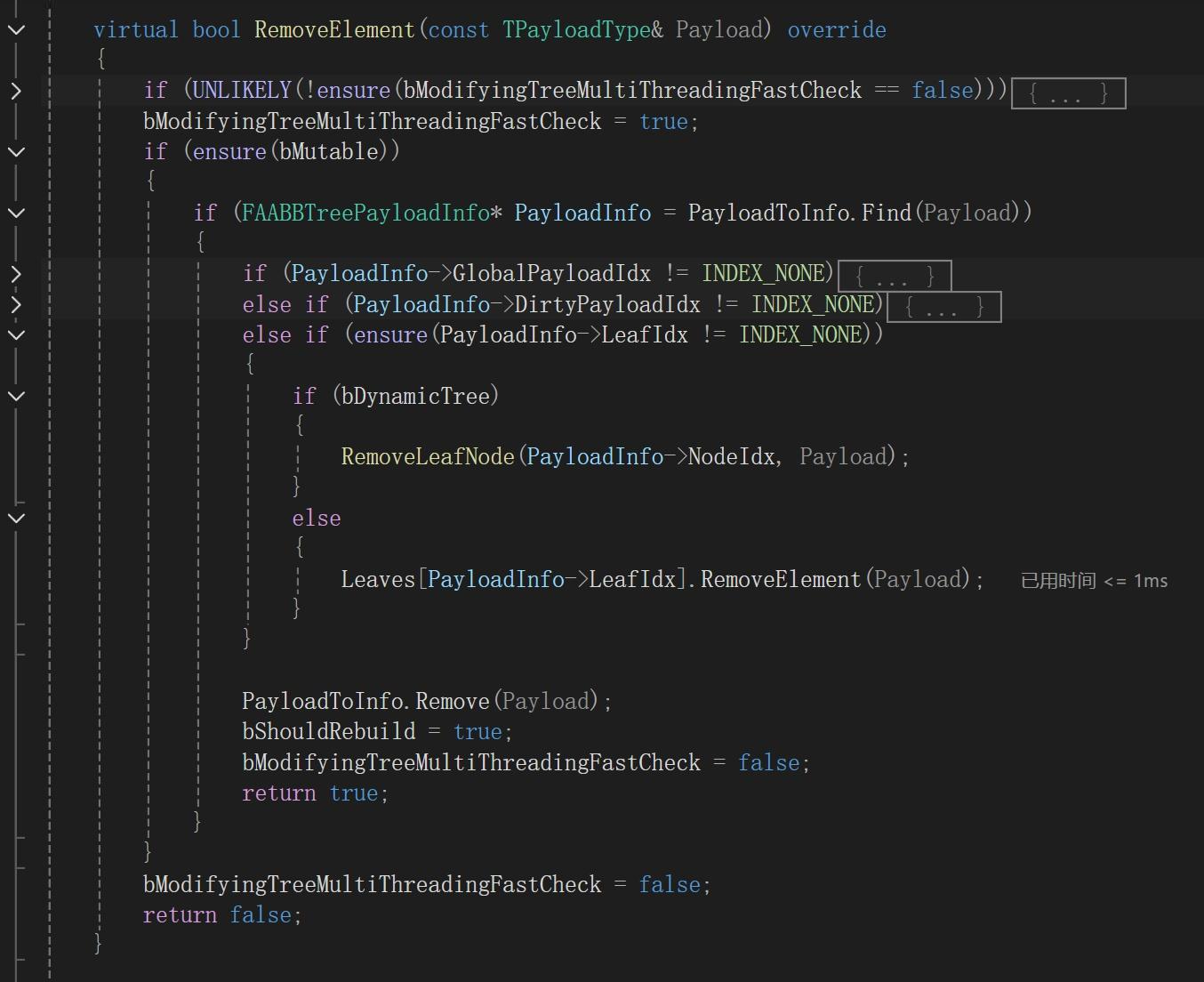
virtual bool RemoveElement(const TPayloadType& Payload)
首先从PayloadToInfo中找到Payload所属的节点下标,然后从节点的Element数组里把Payload移除即可,并且把到根节点链路上的所有Bounds再更新一遍。
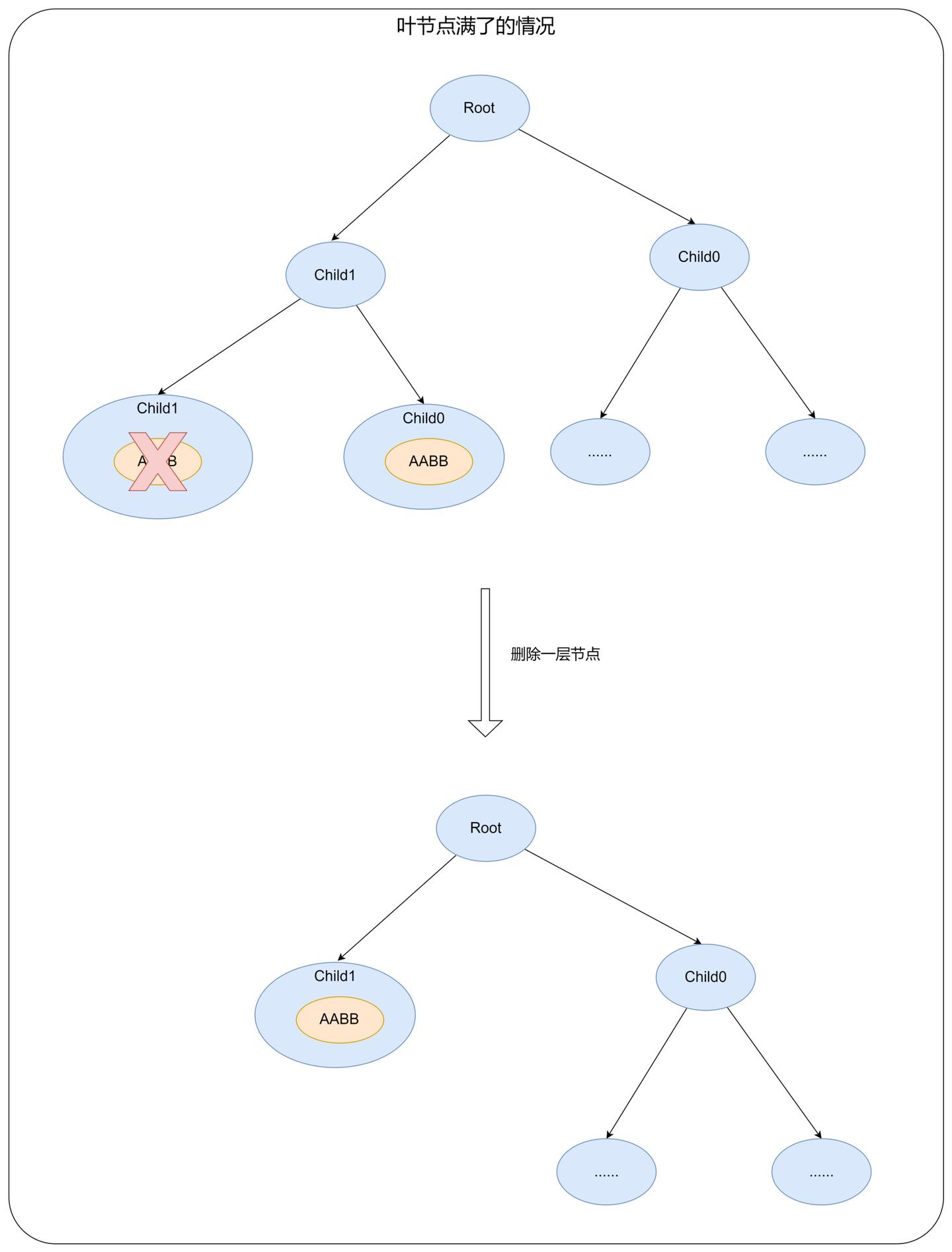
但是特别的,当叶节点删除Payload后整个都空了,就要精简一下AABB树了,把Parent节点和自己都删掉,然后Parent节点的位置放Sibling节点即可。
Static AABBTree
AABBTree大体上分了Dynamic Tree和Static Tree两类,其中Dynamic Tree最贴近原生的AABBTree实现,增、删、改都直接操作AABBTree即可,而Static Tree则做了不少优化,来提升效率。因为通常Static Tree里的元素远超Dynamic Tree。
“Static”并不意味着不更新,比如可以把石头先改成Movable移动,再改回Static等等。Static Tree的构建总是先提供所有AABB对象,一次性建好,之后也能继续添加/删除/修改Payload,但树节点结构不实时改变,只会重建。
Static AABBTree的构建
构造函数中提供一个能表示AABB的数组即可,像这里的数组元素有3202个。

接着执行GenerateTree函数来构造AABBTree。
GenerateTree(Particles);
一次性构造一整棵树有个好处,就是能让左右子树尽量空间上均衡,提升之后的查找效率。如果是Dynamic那样一个一个节点的插入,树的质量和节点插入顺序是有关系的。那么重点就是对于一群AABB节点,如何合理地划分左右子树。回想在构造BVH时,有两种常用划分方法,一种是在XYZ三个方向里选取Max-Min最大的一个作为划分轴,然后取中点划分;另一种是SAH表面积启发算法,同样是考虑XYZ三个轴,但在每个轴上要计算多种表面积划分组合,再选取某个能使Cost最小的位置做划分,计算量更大,但效果也更好。UE的AABBTree使用了更接近前者的简单做法,但不会取Max-Min最大的作为划分轴,而是计算每个轴上AABB 中心点形成的方差,取方差最大的轴作为划分轴。计算中心点和方差的代码如下,使用了流式数据常用的Welford算法。

举个二维平面的例子。
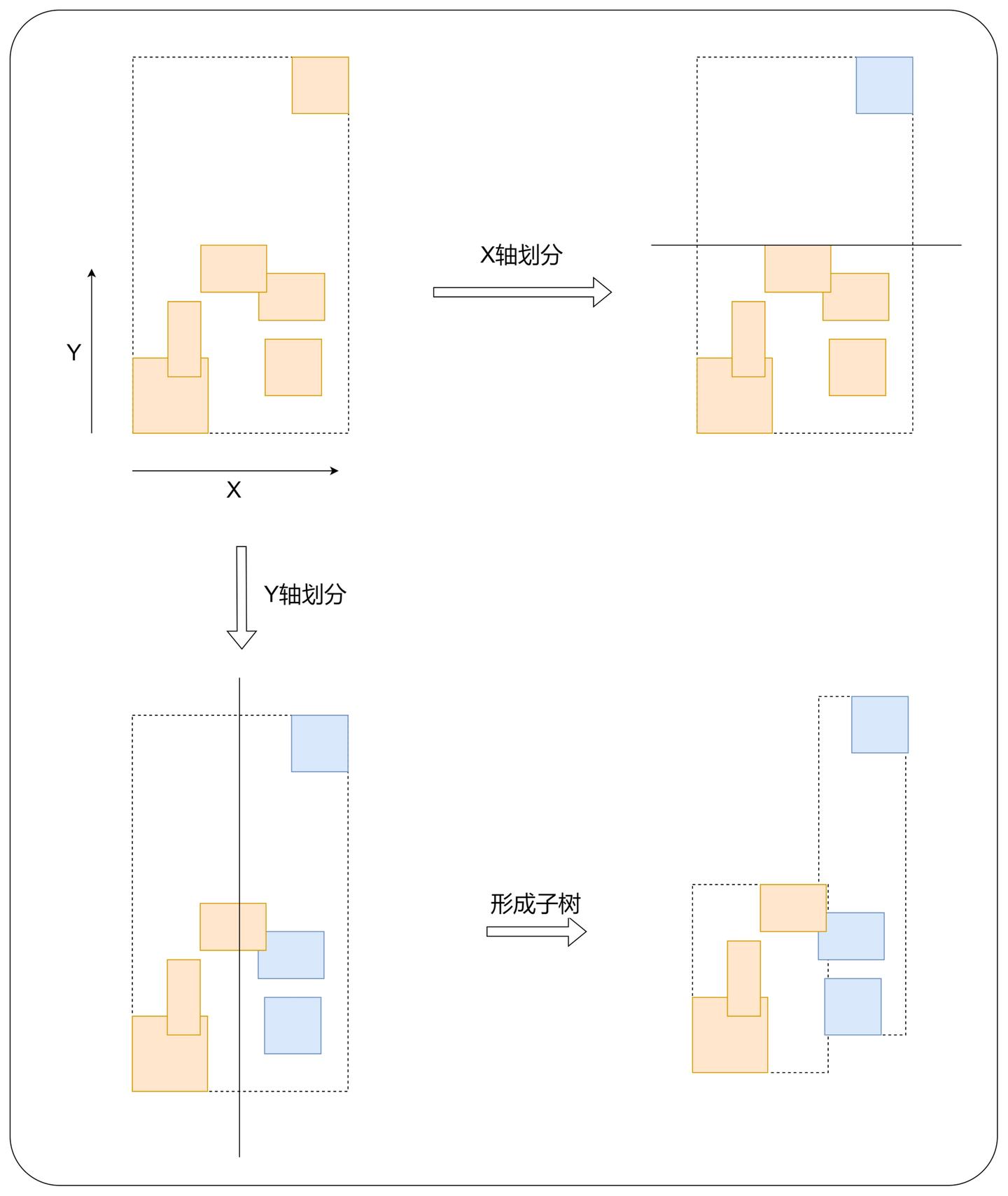
按照Max-Min的方式,应该用X轴划分,按照方差方式,应该按照Y轴划分,结果上看方差方式更优。
然后GenerateTree的具体实现上,也有两个特点,一是支持分帧构建,避免突然卡一下,另一个就是全程避免递归和动态内存分配了,是比较值得学习的工程实践。
Static AABBTree删除Payload
如果Static AABBTree要删除Payload,过程反而更简单,直接从Leaves数组中移除Payload即可,不用考虑树的坍缩,也不用更新整个树节点链路上的AABB包围盒。
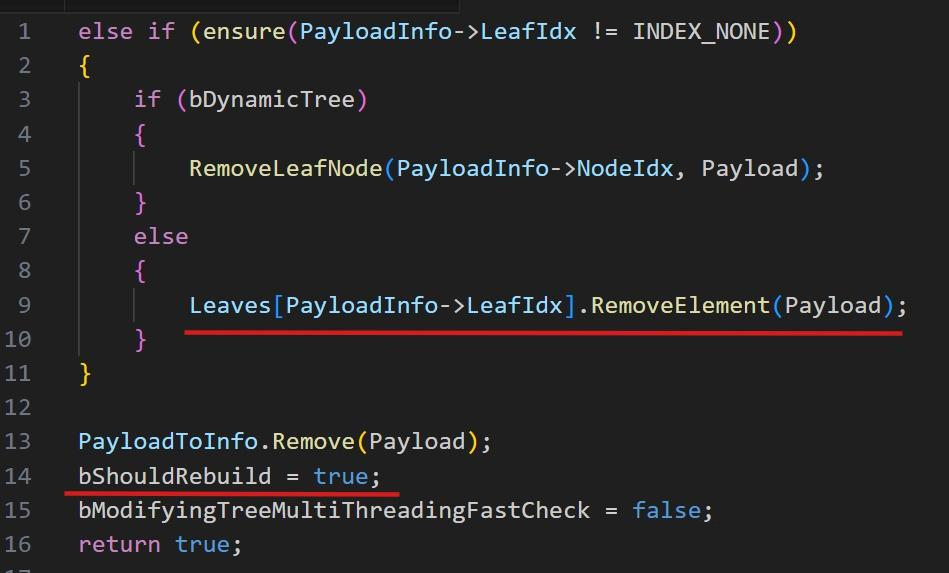
然后标记ShouldRebuild为true,等待后面一起更新树,见PBDRigidsEvolution.cpp文件。
Static AABBTree插入Payload
插入Payload比较有意思,既要不改变AABBTree的结构,又要插入元素。UE做法是另外创建了一个容器,来存储插入的元素,而且这个容器同样支持空间加速查询。一种实现是2D Grid,另一种实现是再加一个Dynamic AABBTree。还是比较复杂的。
Grid实现
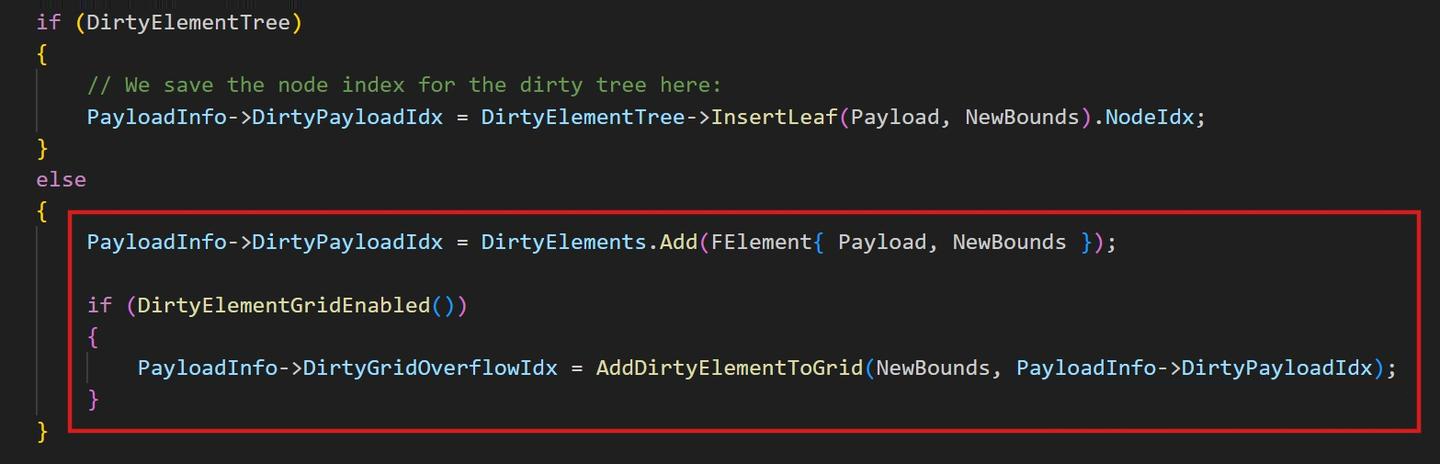
默认用Grid实现,首先Payload加入DirtyElements数组,然后把整个场景划分为2D正方形Grid,再把Payload加入到Grid数据结构中。
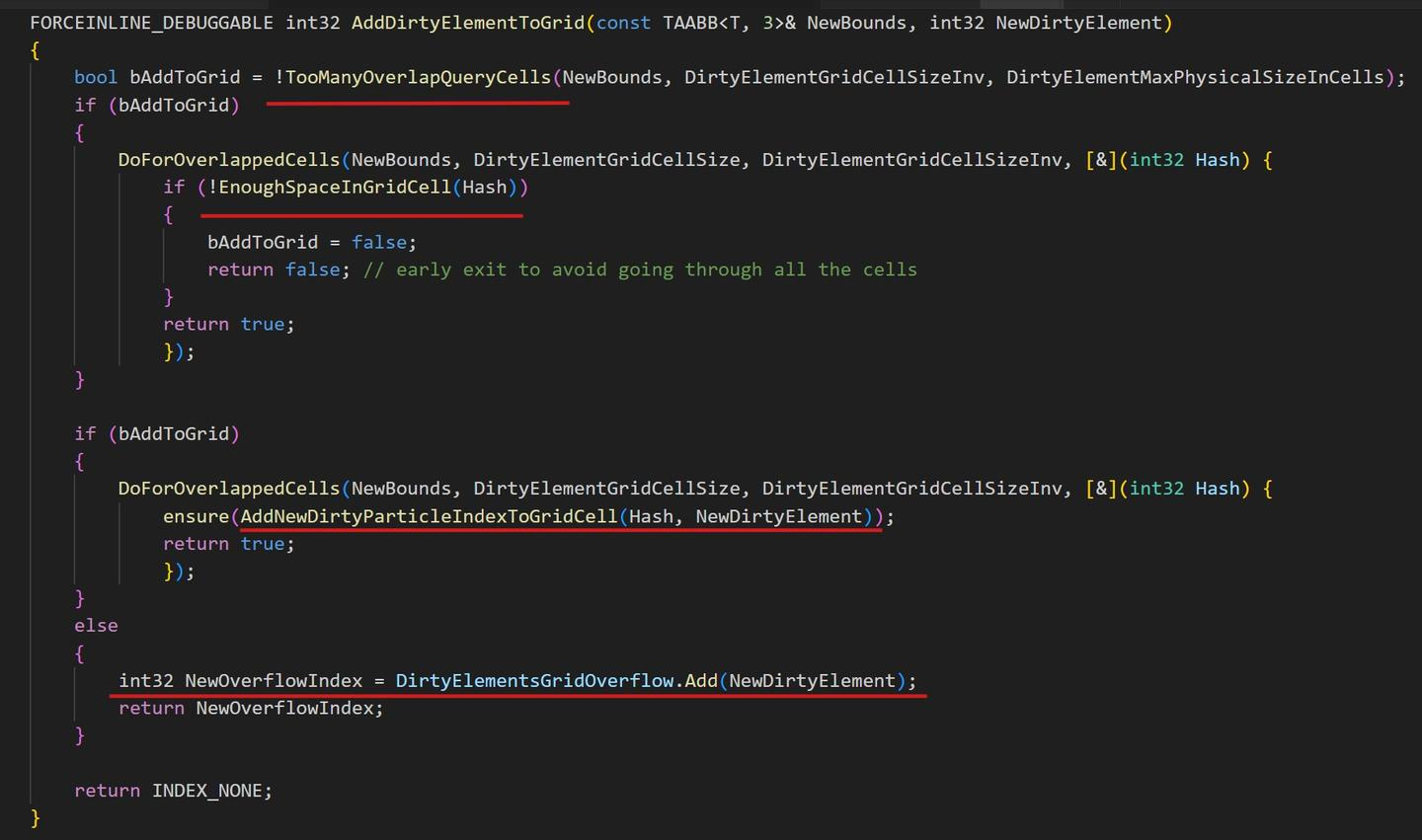
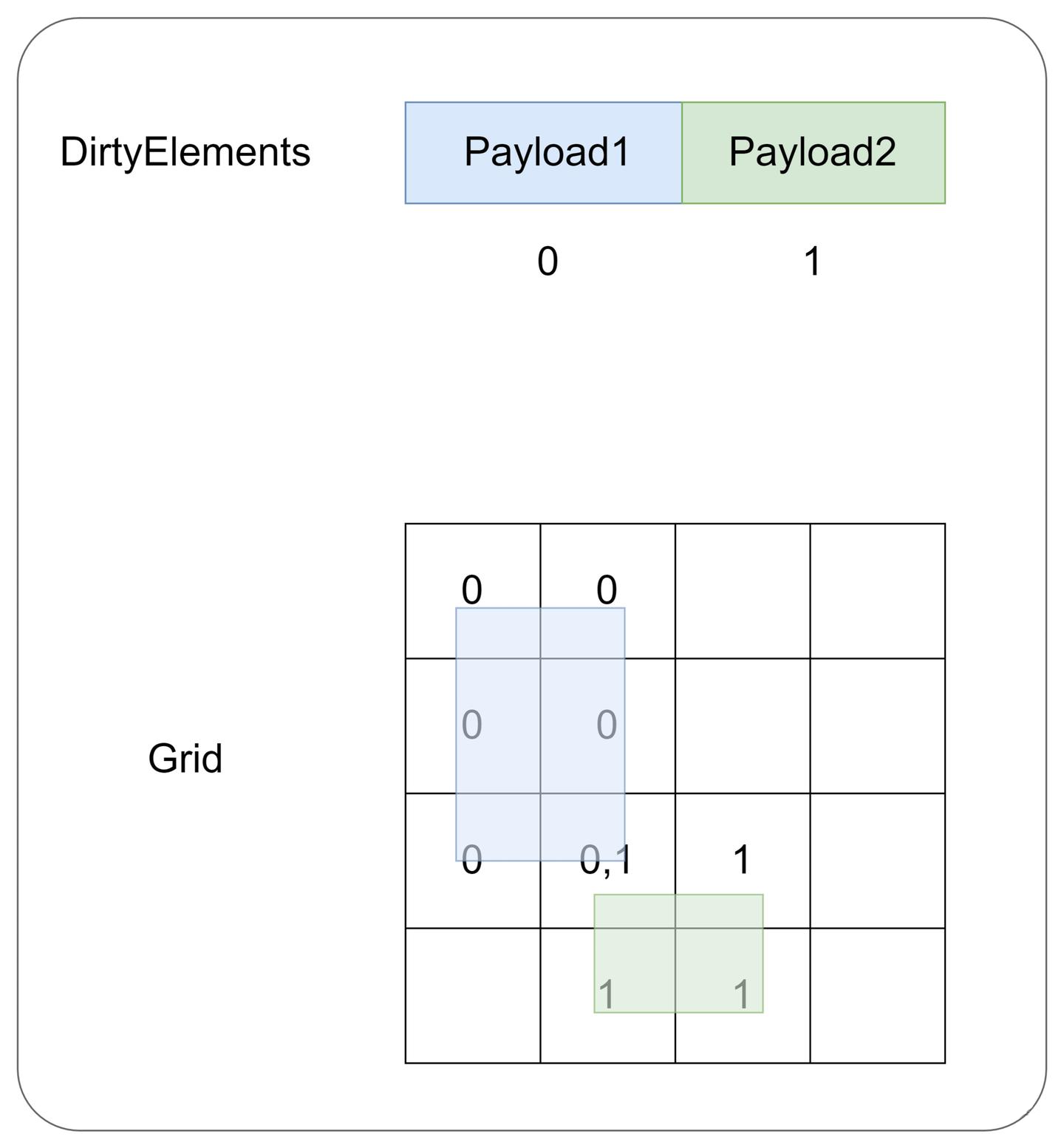
Grid的每个Cell大小为CVarDirtyElementGridCellSize,默认1000,如果一个Payload和某个Cell重叠,该Cell就会把Payload的DirtyPayloadIndx记下来。
但Grid也有大小限制和容量限制。首先,Payload所覆盖的Cell不能过多,即Payload的AABB不能过大,然后每个Cell重叠的Payload数量不能过多,不然都会影响效率。目前前者配置是16,后者配置是32。如果超过了限制,Payload就要被加入到单独的DirtyElementsGridOverflow数组,并把下标记录在PayloadInfo中,后续也会单独查询。
Grid示意图如下:
DirtyElementTree实现
新加的AABBTree称为DirtyElementTree,Payload插入完成后,PayloadInfo会存储其在DirtyTree中的Node下标。
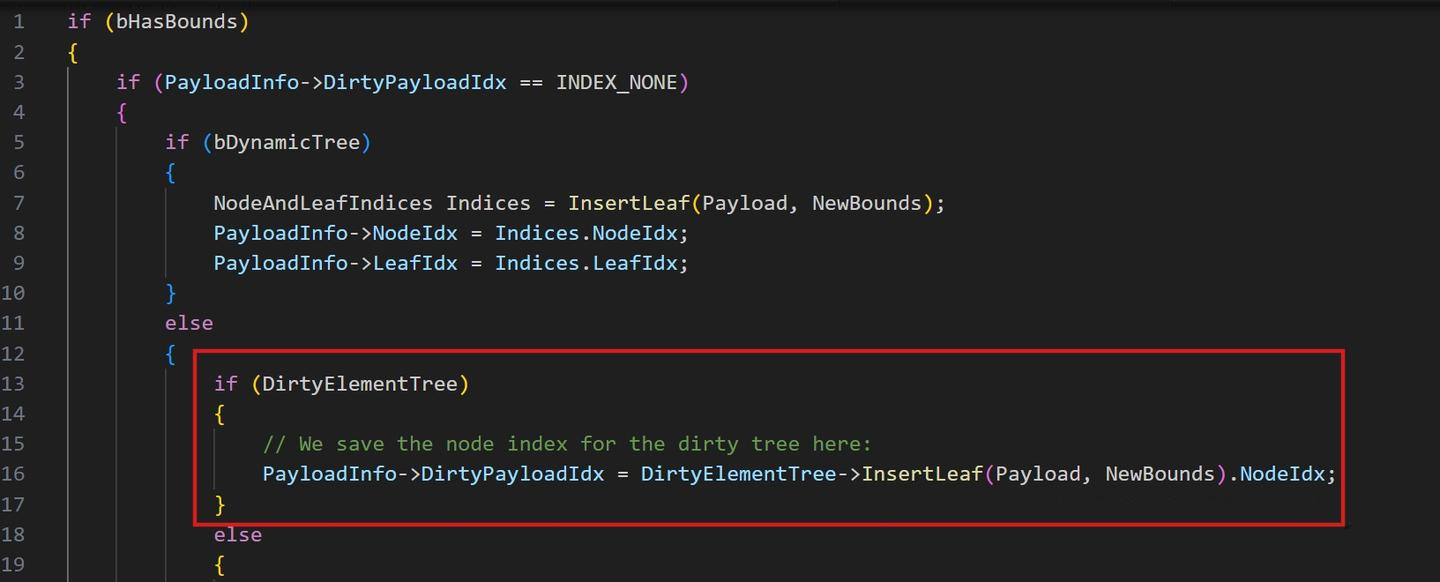
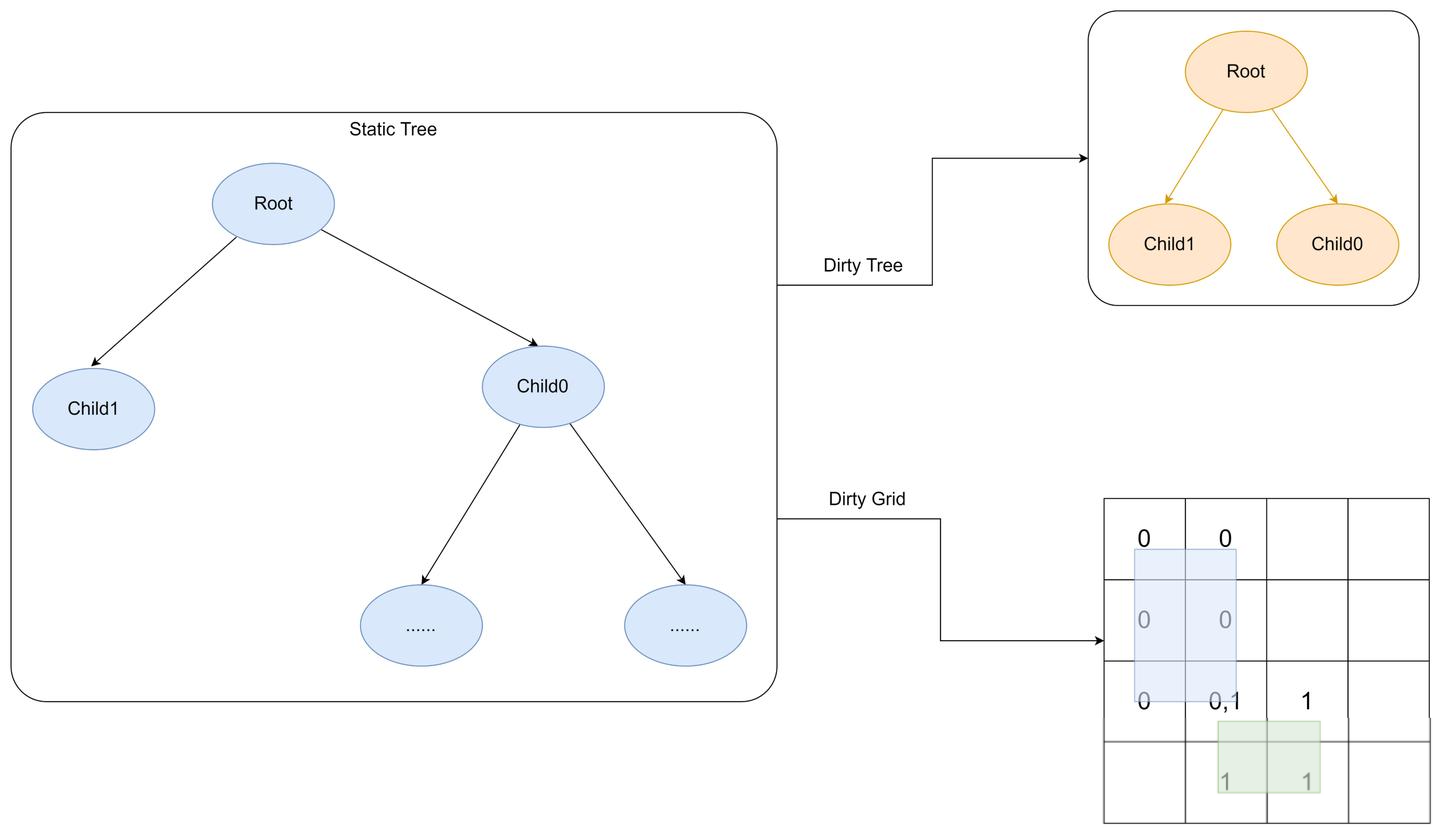
如此一来,Grid/DirtyElementTree就是Static AABBTree的一部分了,往后的增/删/改Payload,以及AABBTree做碰撞查询,都要额外考虑它们。后面AABBTree重建了,再清空Grid/DirtyElementTree。
AABBTree可视化
最后,可以读取AABBTree的所有元素,并画出来,看下AABBTree都是什么样。
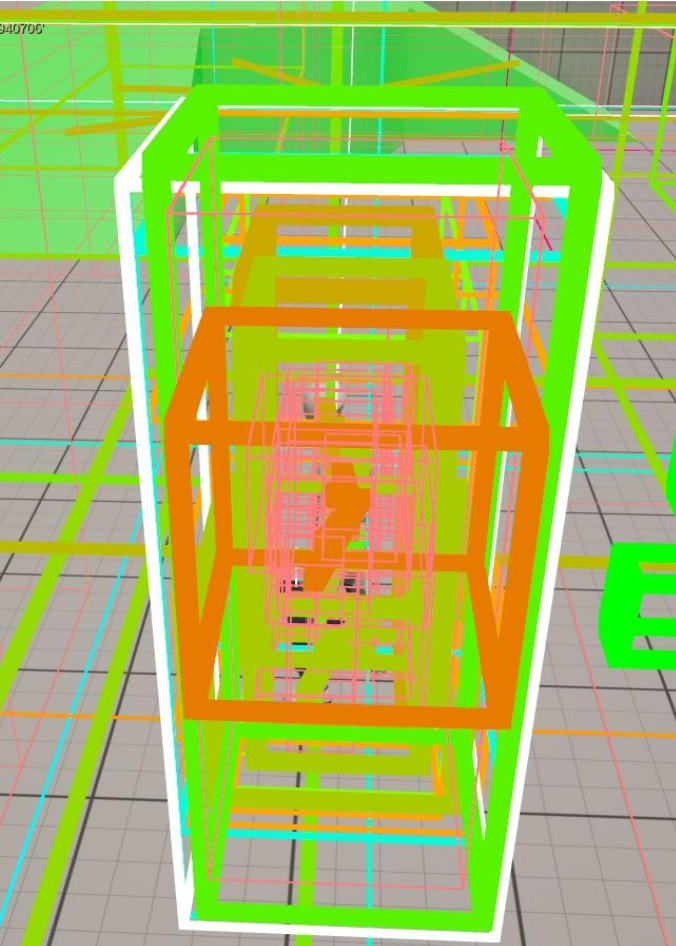
遍历PhysicsScene的SolverAccelerationStructure属性即可,可以看到整个AABBTree还是比较复杂的。
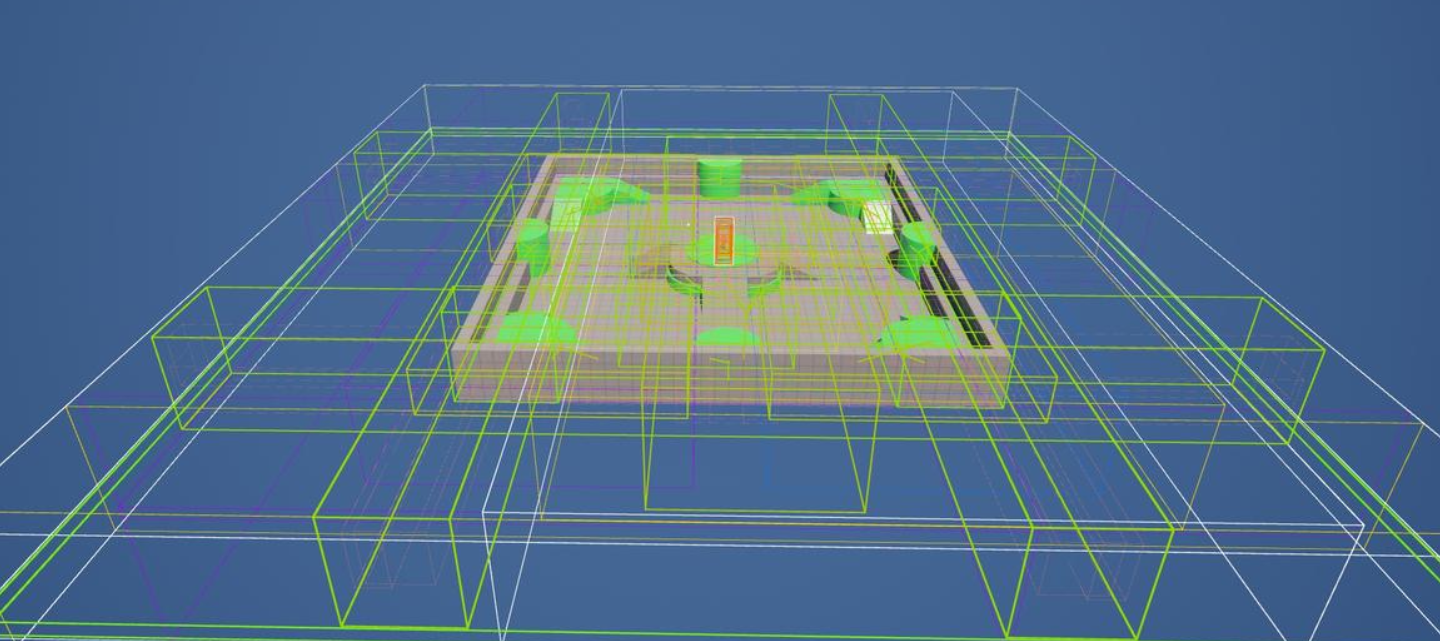
尤其是中间角色,有多个BodyInstance。
碰撞通道设置
一个PrimitiveComponent,不仅包含几何信息,还可以配置它的碰撞通道、ObjectType、CollisionType等信息,这些设置都会影响到PrimitiveComponent的物理表现。比如例子中的StaticMeshComponent,默认的ObjectType为WorldStatic,然后对所有CollisionResponses的响应都是Block。
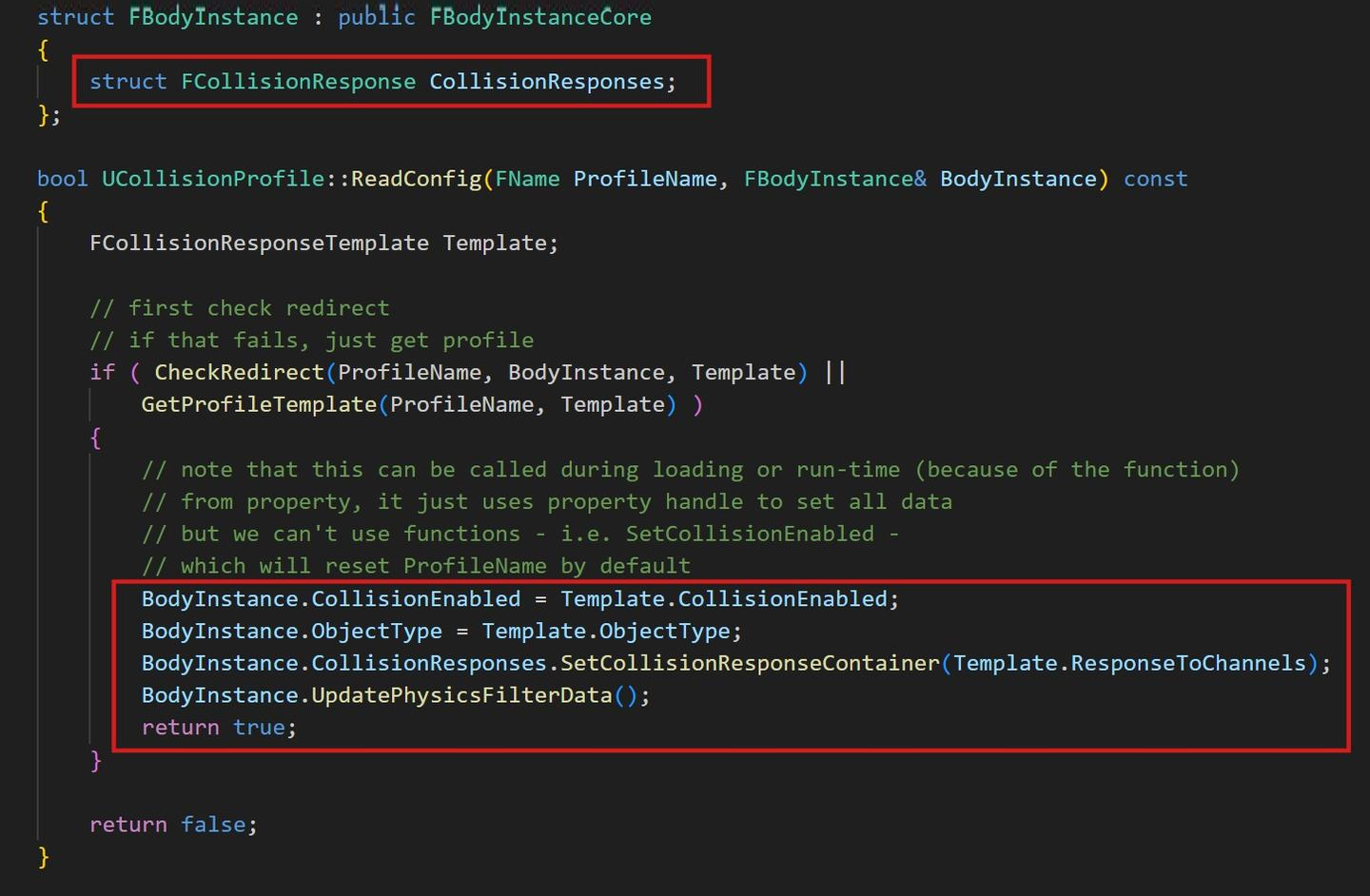
首先需要根据ColllisionProfileName加载对应的各个碰撞响应,每个BodyInstance都自己存了一份CollisionProfileName和CollisionResponses,加载函数为UCollisionProfile::ReadConfig。至于为什么每个BodyInstance都要存一份,而不是用BodySetup里的,是因为运行时可以动态改变单个BodyInstance的碰撞设置。
此时这些碰撞设置还是一堆Bool和Enum,对于底层物理引擎存储不太方便,因此要把它们进行编码,最终会存入四个int32,用FCollisionFilterData表示。
struct FCollisionFilterData
{
uint32 Word0;
uint32 Word1;
uint32 Word2;
uint32 Word3;
};
在CreateShapes函数中,会对碰撞数据进行编码,并且生成三个FCollisionFilterData实例,存储不同用途的物理碰撞信息。
/** Helper struct holding physics body filter data during initialisation */
struct FBodyCollisionFilterData
{
FCollisionFilterData SimFilter;
FCollisionFilterData QuerySimpleFilter;
FCollisionFilterData QueryComplexFilter;
};
编码过程主要由CreateShapeFilterData函数实现。

SourceObjectID:UPrimitiveComponent的UniqueID。
InstanceBodyIndex:这是UPrimitiveComponent里的第几个BodyInstance,比如常见的SkeletalMeshComponent有多个BodyInstance。
SimFilter:物理模拟相关信息。
inline void GetSimData(uint32 BodyIndex, uint32 ComponentID, uint32& OutWord0, uint32& OutWord1, uint32& OutWord2, uint32& OutWord3) const
{
OutWord0 = BodyIndex;
OutWord1 = BlockingBits;
OutWord2 = ComponentID;
OutWord3 = Word3;
}

QuerySimpleFilter:SimpleCollision的碰撞响应。
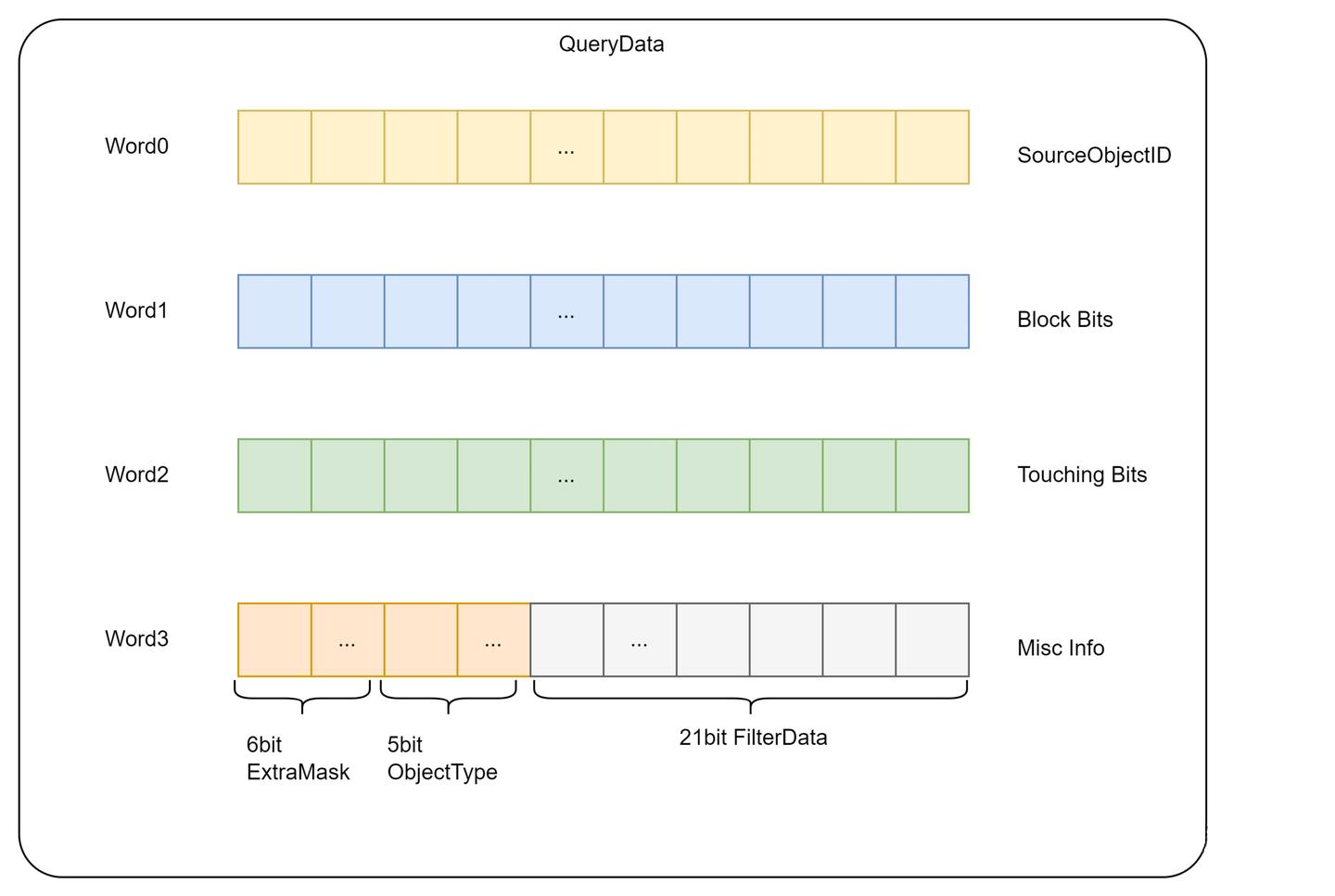
inline void GetQueryData(uint32 SourceObjectID, uint32& OutWord0, uint32& OutWord1, uint32& OutWord2, uint32& OutWord3) const
{
OutWord0 = SourceObjectID;
OutWord1 = BlockingBits;
OutWord2 = TouchingBits;
OutWord3 = Word3;
}
QueryComplexFilter:ComplexCollision的碰撞响应,响应部分和Simple是一样的。
// Build filterdata variations for complex and simple
SimpleQueryData.Word3 |= EPDF_SimpleCollision;
if (bUseSimpleAsComplex)
{
SimpleQueryData.Word3 |= EPDF_ComplexCollision;
}
ComplexQueryData.Word3 |= EPDF_ComplexCollision;
if (bUseComplexAsSimple)
{
ComplexQueryData.Word3 |= EPDF_SimpleCollision;
}
OutFilterData.QuerySimpleFilter = SimpleQueryData;
OutFilterData.QueryComplexFilter = ComplexQueryData;
Word3的设置:
inline uint32 CreateChannelAndFilter(ECollisionChannel CollisionChannel, FMaskFilter MaskFilter)
{
uint32 ResultMask = (uint32(MaskFilter) << NumCollisionChannelBits) | (uint32)CollisionChannel;
return ResultMask << NumFilterDataFlagBits;
}
PrimitiveComponent的销毁
Component销毁时,需要同步的清除掉物理世界数据,主要通过FBodyInstance::TermBody函数实现。
1.从PhysScene的几个容器里移除
PhysicsProxyToComponentMap和ComponentToPhysicsProxyMap。
2.从PhysScene的加速结构中移除
FChaosScene::RemoveActorFromAccelerationStructure
就是从AABBTree移除,先从Buckets找到对应的AABBTree,然后调用RemoveElement移除。
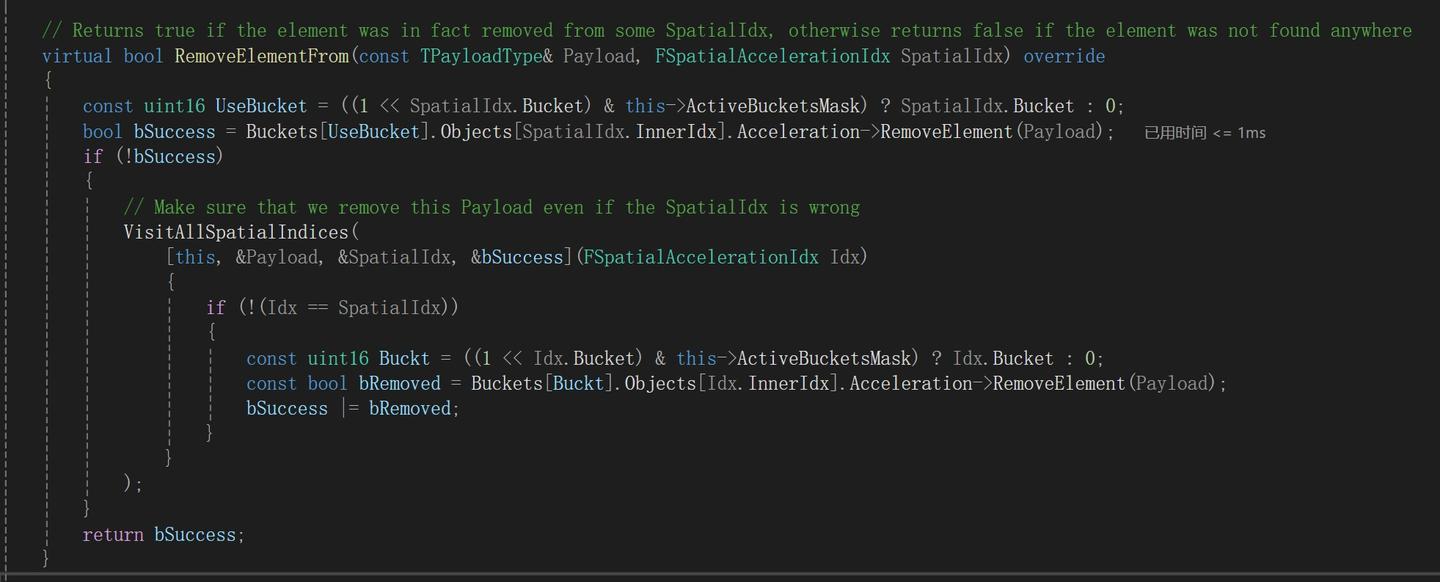
最终进入AABBTree的RemoveElement函数,根据DynamicTree属性、使用Grid还是DirtyElementTree等情况,做移除。
3.从Solver中移除
FPBDRigidsSolver::UnregisterObject,物理模拟信息的删除。
这是侑虎科技第1966篇文章,感谢作者南京周润发供稿。欢迎转发分享,未经作者授权请勿转载。如果您有任何独到的见解或者发现也欢迎联系我们,一起探讨。(QQ群:793972859)
作者主页:https://www.zhihu.com/people/xu-chen-71-65
再次感谢南京周润发的分享,如果您有任何独到的见解或者发现也欢迎联系我们,一起探讨。(QQ群:793972859)