
UE5 Chaos物理|物理查询的实现
- 作者:admin
- /
- 时间:5月8日
- /
- 浏览:1014 次
- /
- 分类:厚积薄发
【USparkle专栏】如果你深怀绝技,爱“搞点研究”,乐于分享也博采众长,我们期待你的加入,让智慧的火花碰撞交织,让知识的传递生生不息!
射线检测接口
游戏业务常见的需求就是做各种射线检测/Overlap检测/Sweep检测,比如Character Movement Component。
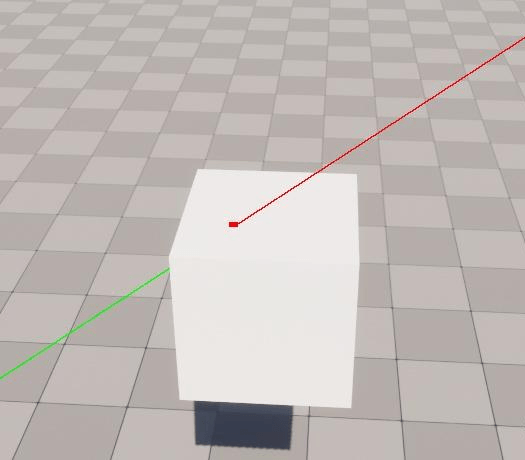
下面例子是使用Visibility Channel做Line Trace,StaticMesh对其是Block的。
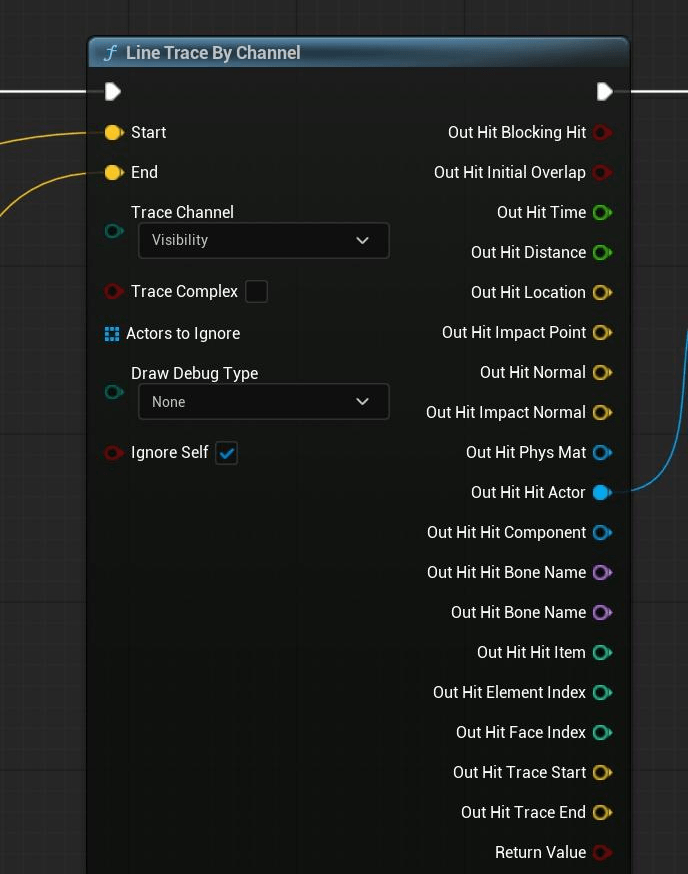
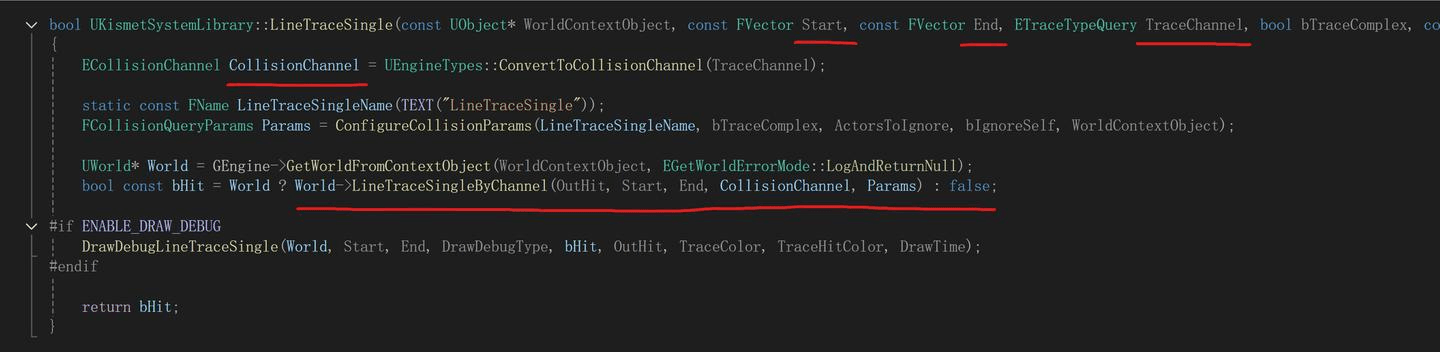
各种Trace,最终都调用到SceneTrace。
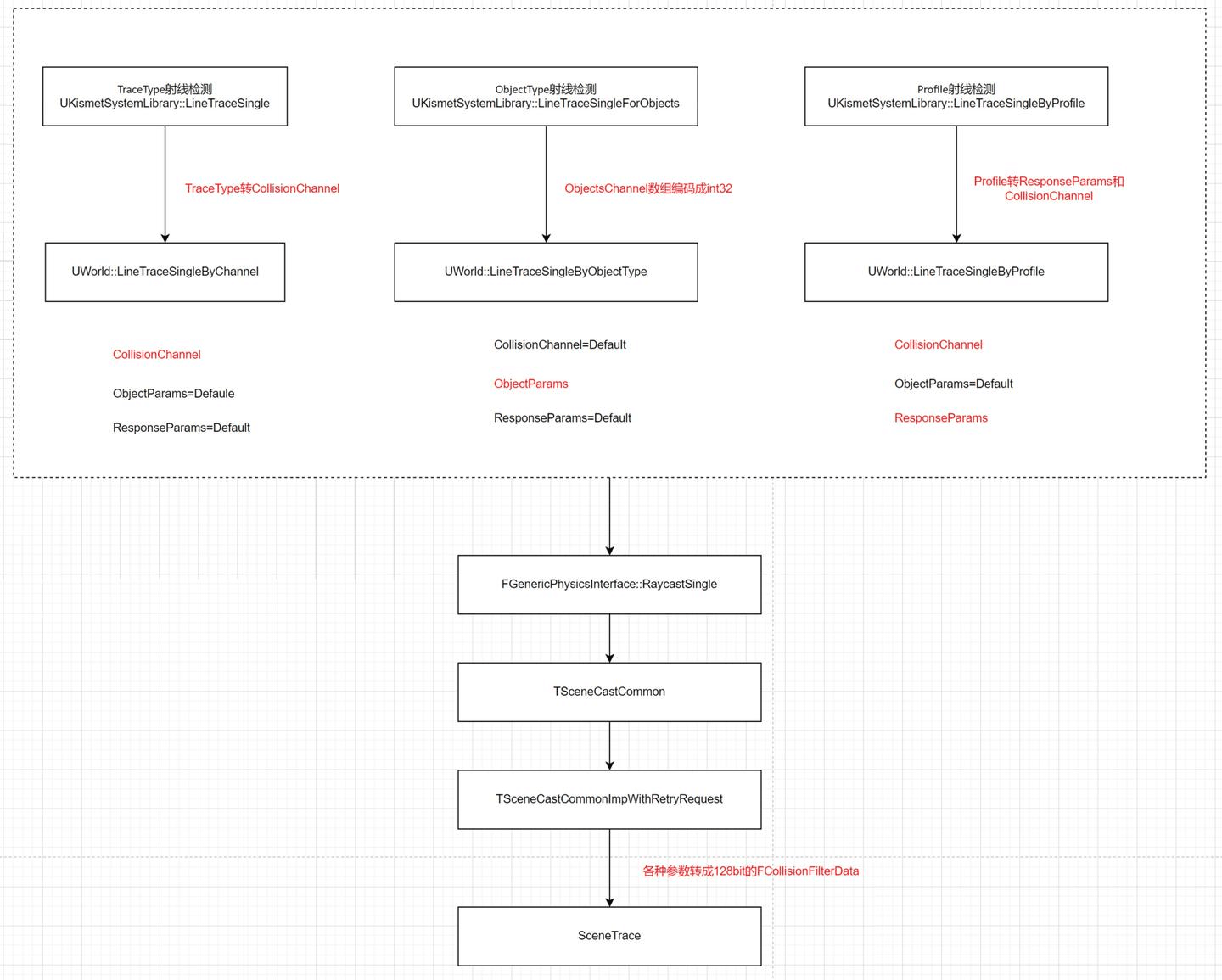
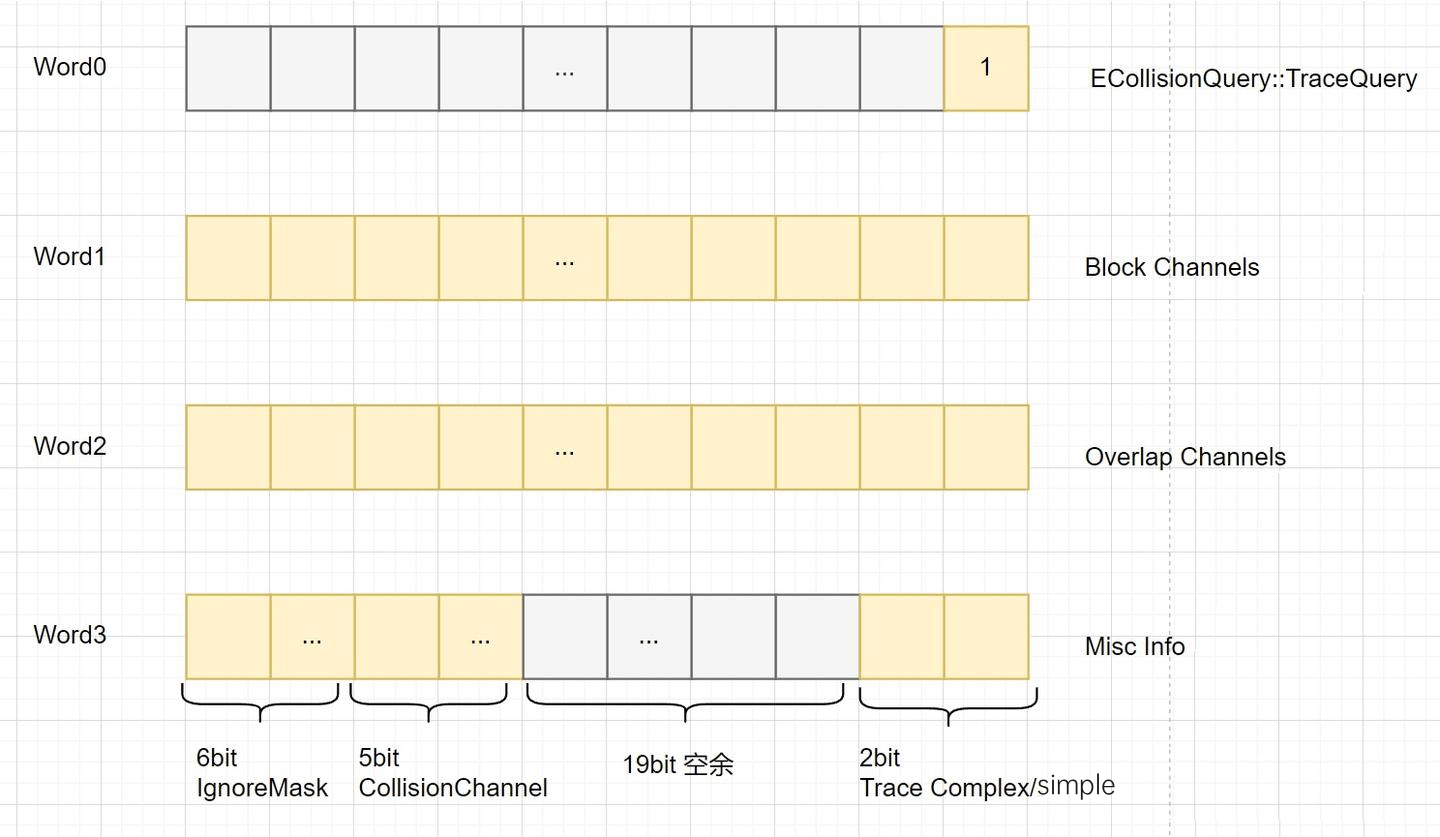
使用的TraceChannel,ObjectType等条件,最终都编码成四个4B的Word,下面是TraceChannel的例子。
物理查询,主要就是对AABB Tree的查询。
SceneTrace
ReadLock
要对物理场景做查询,首先加读锁。可以和其他Trace请求同时执行,但和写物理场景操作互斥。


然后获取加速结构Collection,里面有Static AABBTree和Dynamic AABBTree。
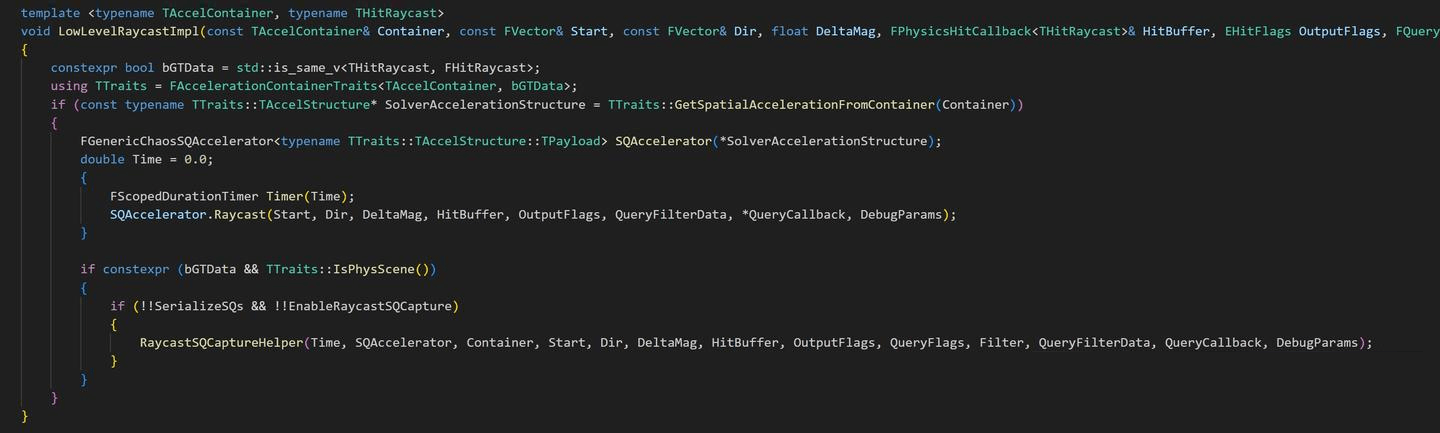
最后进到TSpatialAccelerationCollection::RaycastFast。
这里Types就是Buckets,TypeIdx是从0开始的下标,会逐个遍历Buckets,然后对里面的每个AABBTree,调用RaycastFast函数。
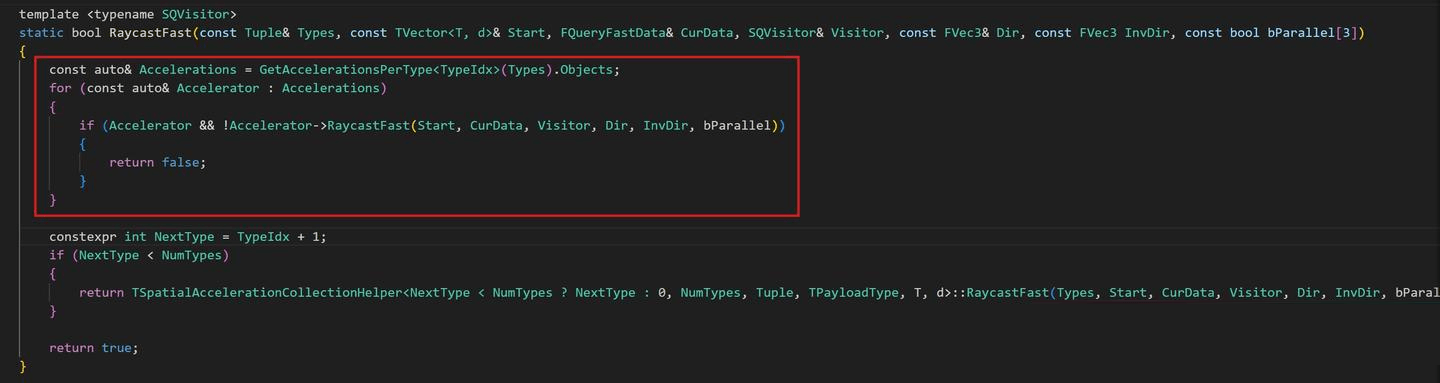
注意第一个Bucket存了非常大的AABB,也就是说如果场景内有很多大的物体,是会拖慢射线检测效率的。
TAABBTree::QueryImpl
比较大的函数,做AABBTree的遍历。
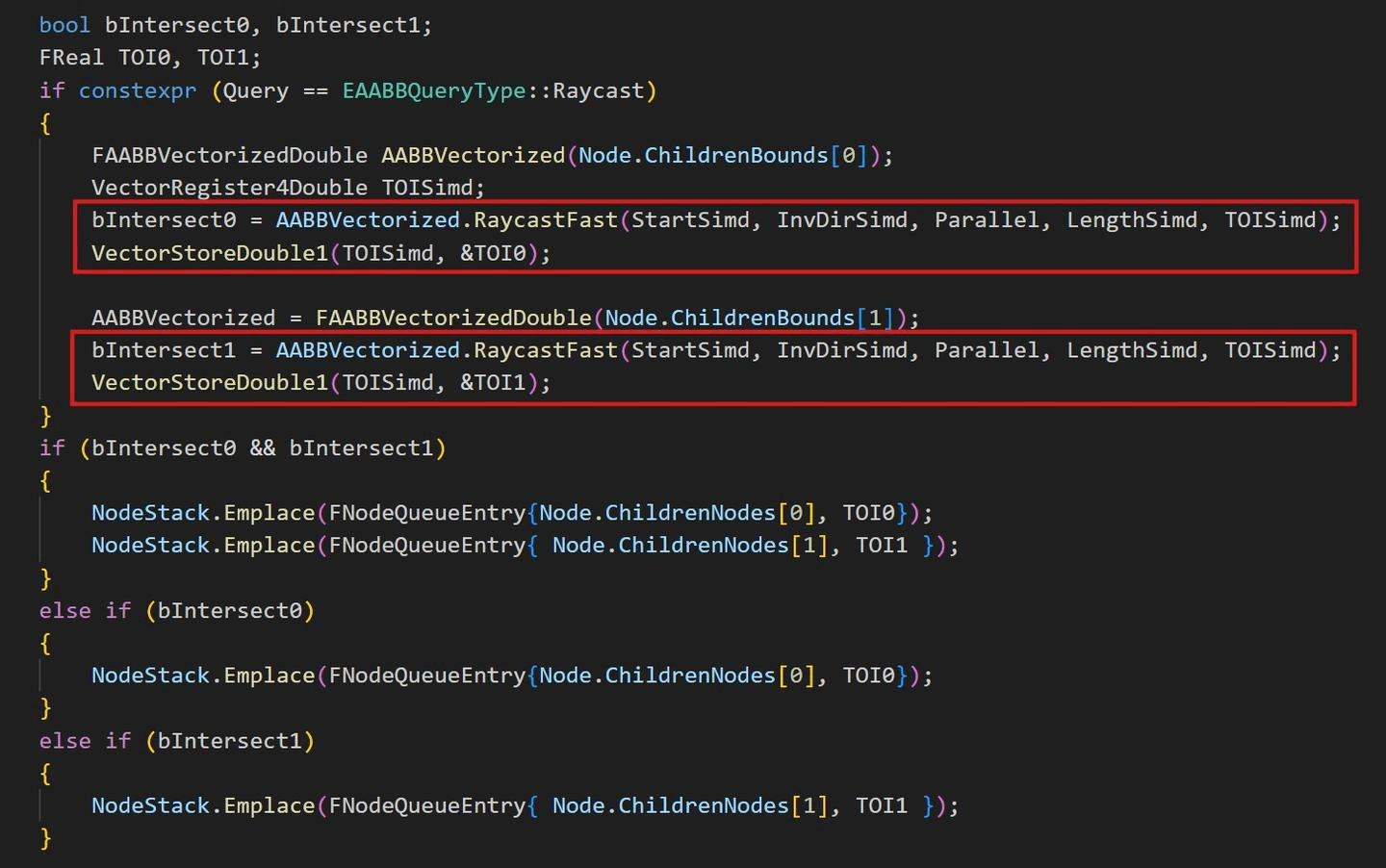
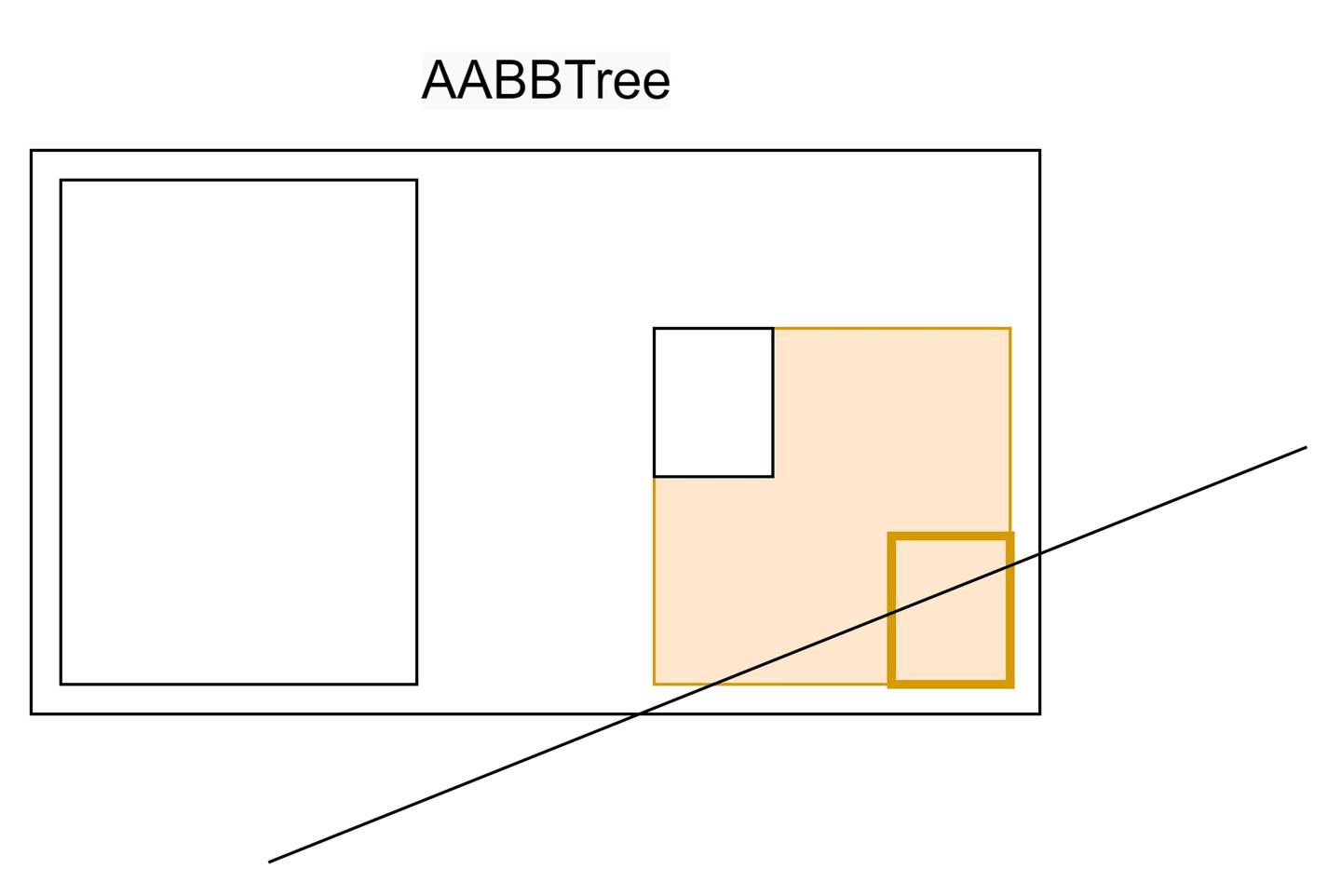
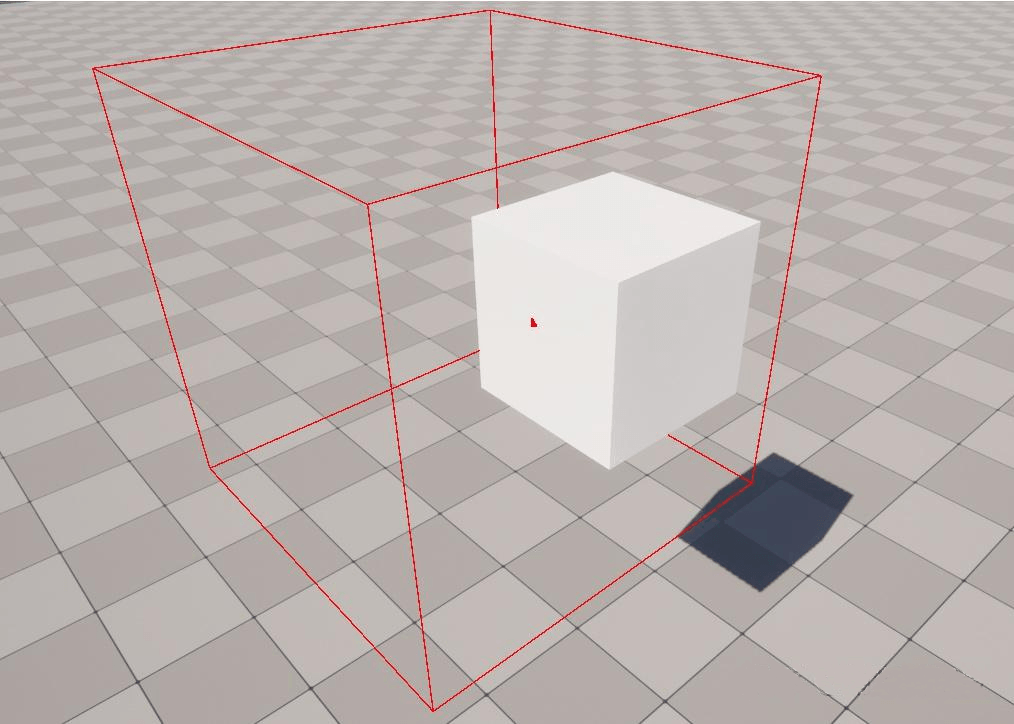
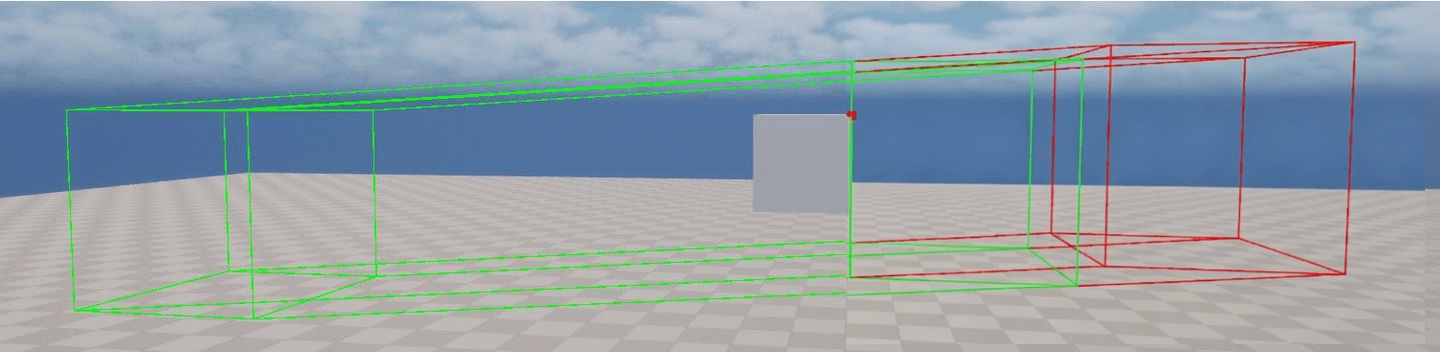
AABBTree非叶节点的遍历
经典的BVH检测方式,先检查射线和左右子树AABB是否相交,然后根据相交情况,不断对左右子树做遍历。加速方式为SIMD的应用,以及非递归的遍历AABBTree。
示意图如下:
SIMD版本的Slab算法值得一看,判断射线与AABB是否相交,并计算射线在AABB内经过的距离。全程无if...else...。
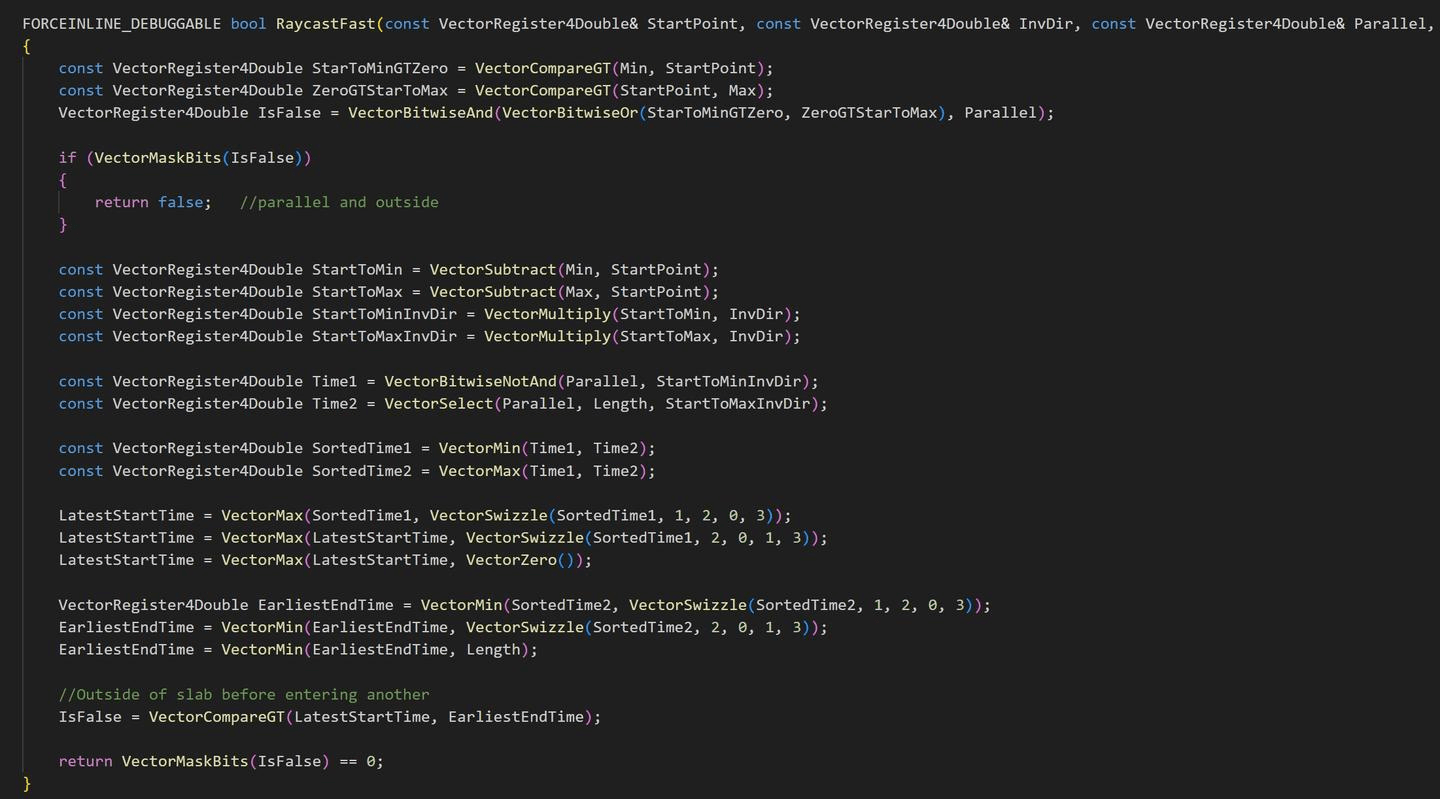
里面的VectorMax和VectorSwizzle的组合比较巧妙,用于在三个数中取最大的。
Slab算法简介
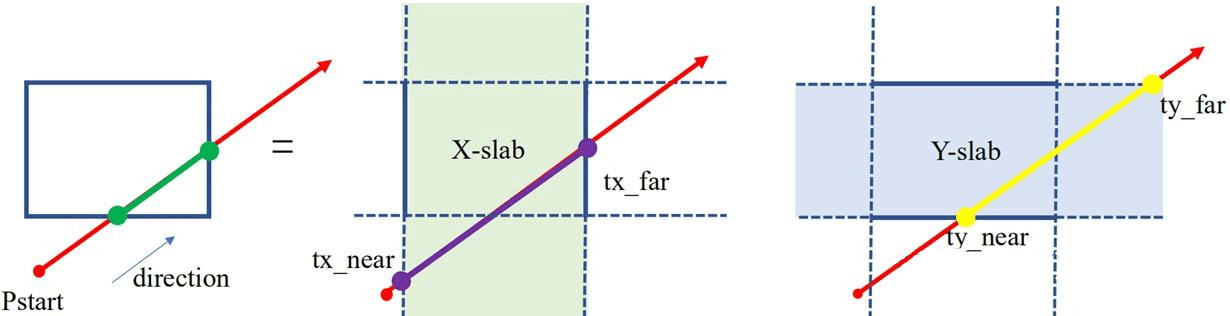
Slab算法(Slab Method)是计算机图形学和物理引擎中用于检测射线(Ray)与轴对齐包围盒(AABB)是否相交的最经典、最高效的算法。
它的核心思想非常简单直观:将3D的AABB盒子看作是三组无限大的“平板对”(Slabs)的交集。
假设射线的起点为P,方向为Dir,把射线写成时间t的方程:
射线进入每个“平板对”,都会有进入时间t0和离开时间t1,如果要与AABB发生重叠,三组t0和t1必定有都重叠的部分。
示意图如下:
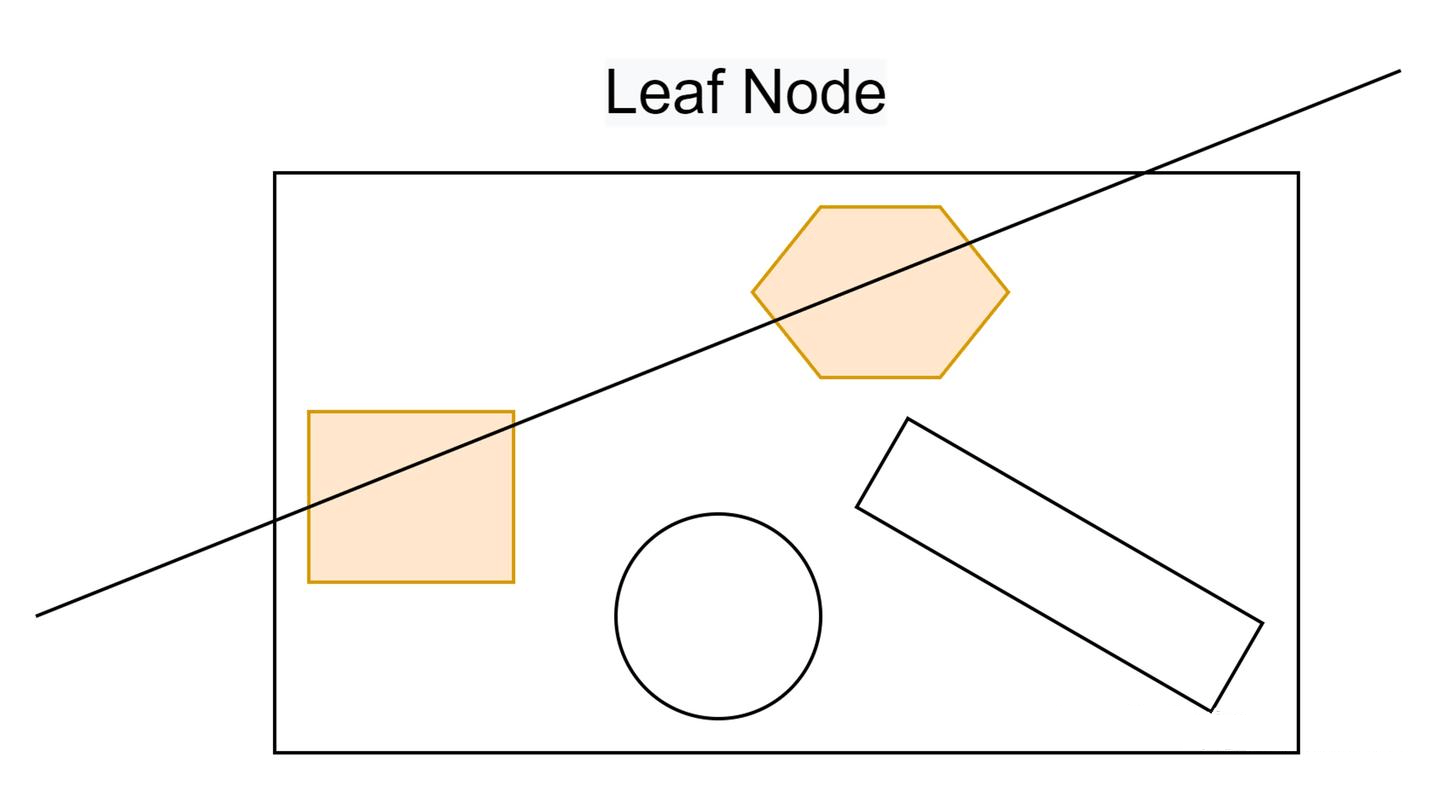
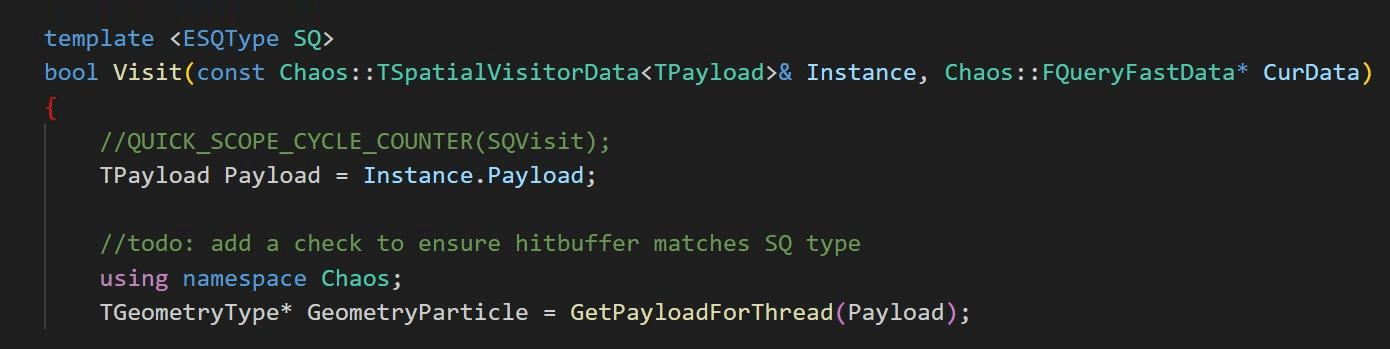
处理叶节点
对于一个Leave节点,射线检测会执行RaycastFastSimd。
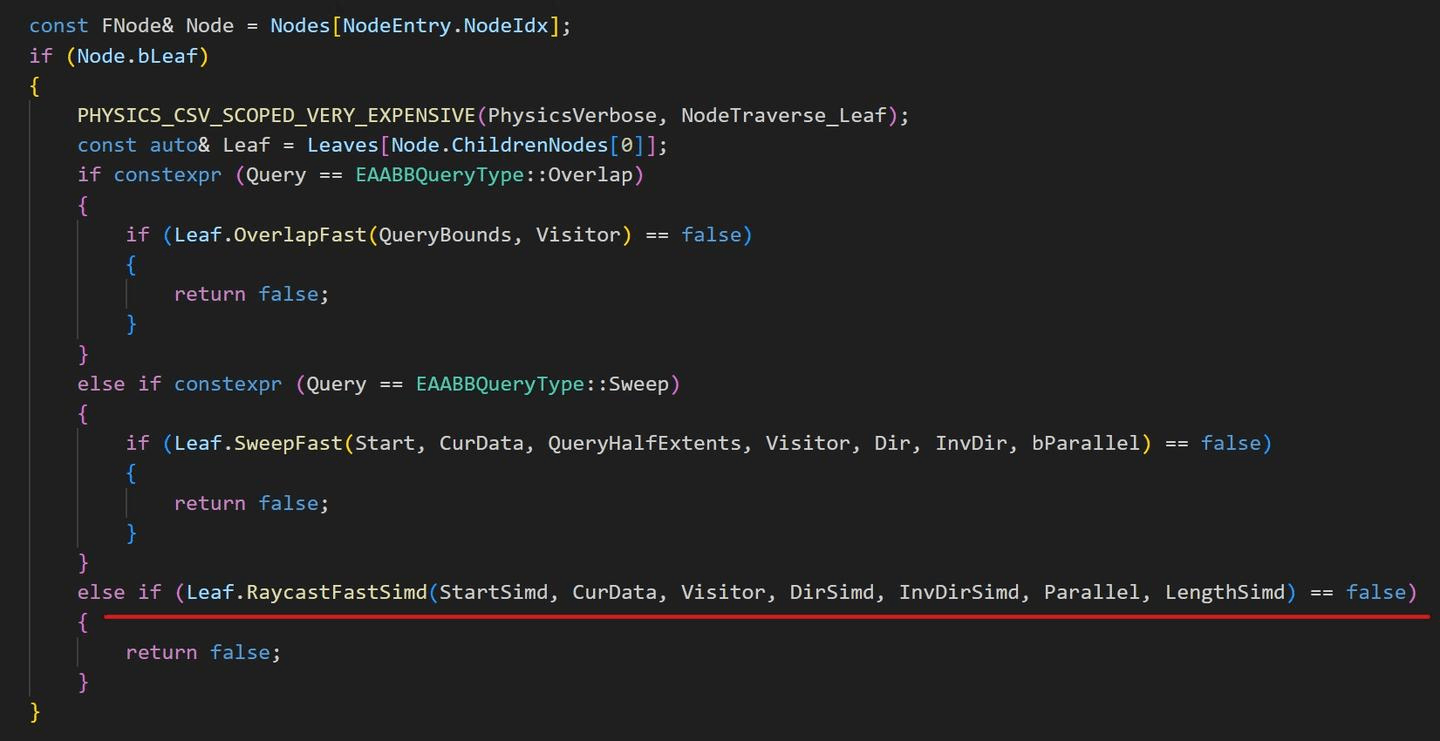
每个Leave节点默认最多有8个Element,它们没有位置关系,因此要逐个对这些Element做射线检测了。
对于Leave中的一个Element,计算和射线是否相交,会经过三道判断。第一道是检查Shape的AABB和射线是否相交,第二道是检查Shape的Channel和QueryChannel是否是Overlap或者Block关系,第三道是真正检查射线和Sphere、Box、凸包等几何体是否相交。前两道是轻量的,算BroadPhase,第三道很重,是NarrowPhase。
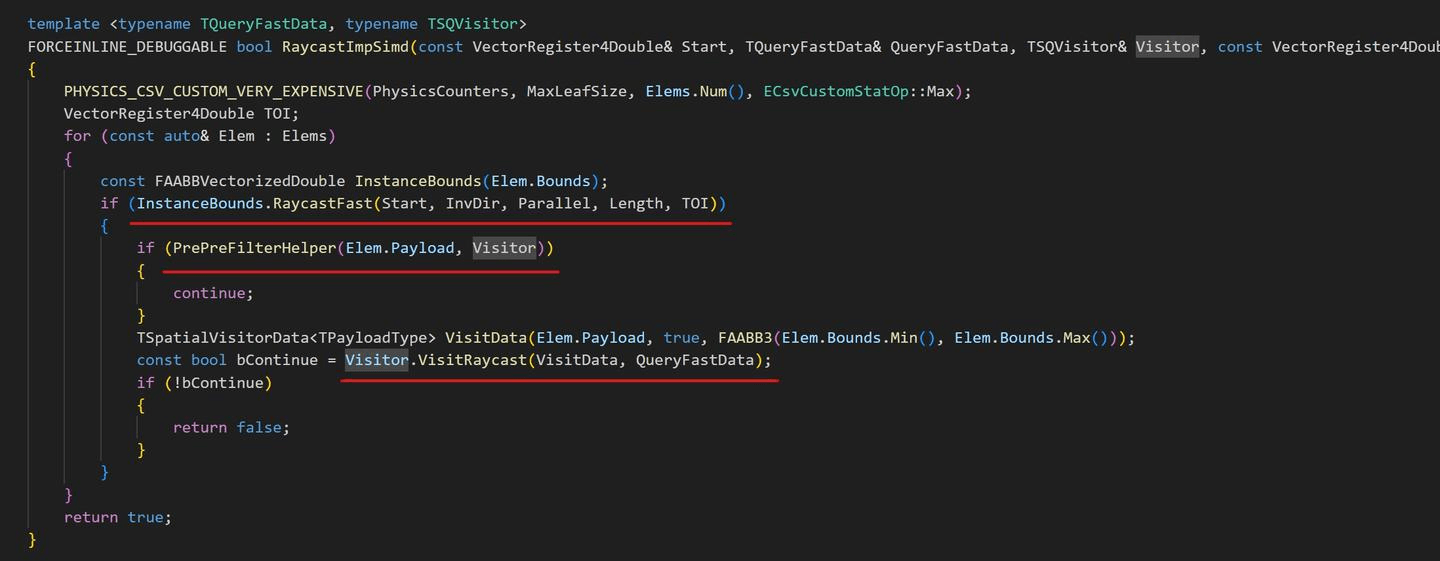
把Channel Response检查放到中间也是挺有意思的。按照正常人类思考逻辑,应该是射线碰到一个Geometry后,再判断这个Geometry对射线Channel响应是Block还是Overlap,但判断射线和Shape相交的操作比较重,尤其是面对凸包。因此从代码效率逻辑出发,就变成了不管Shape和射线是否真的相交,先判断Geometry对Channel的响应,如果是Ignore,就直接不管了。具体做法如下:
第一道,射线和AABB Bounds检查是否相交。
同样的,用SIMD判断射线和AABB是否相交,不再赘述。
第二道,射线检测用的Channel和Geometry的ResponseChannel & BlockChannel是否有重叠。
ResponseChannel & BlockChannel是两个int32,本身是每个Geometry的属性,但AABBTree为了效率,在Payload里都缓存了一份,为UnionQueryFilterData和UnionSimFilterData,CachedUniqueIdx则是所属UObject的UniqueIdx缓存。
具体的Channel Response过滤方法。
PrePreQueryFilter
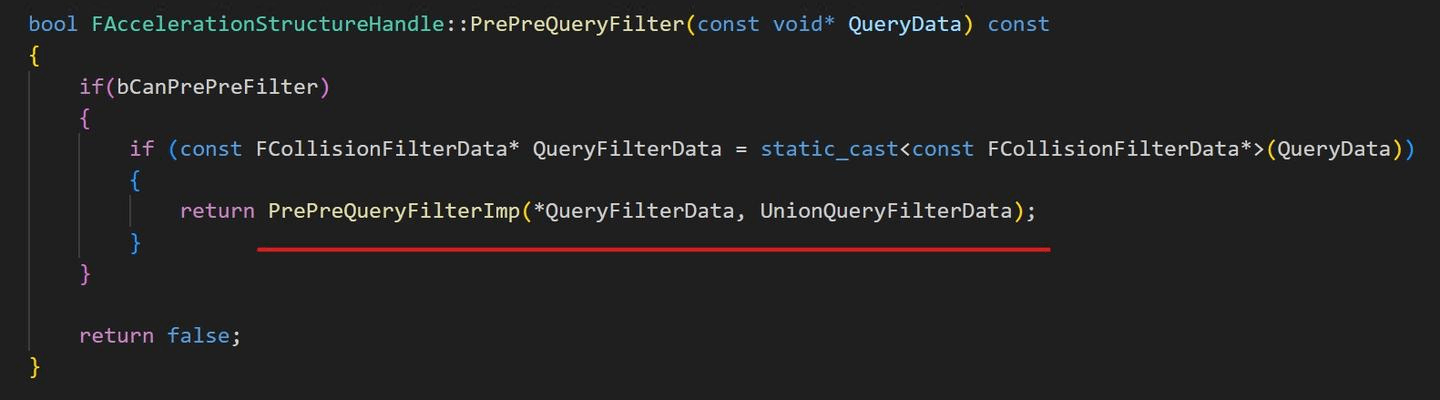
首先从Word0中获取射线检测使用的Channel,然后检查Geometry自身的Word1和Word2,分别是BlockingChannel和OverlapChannel,做bit and操作,看是否有交集。
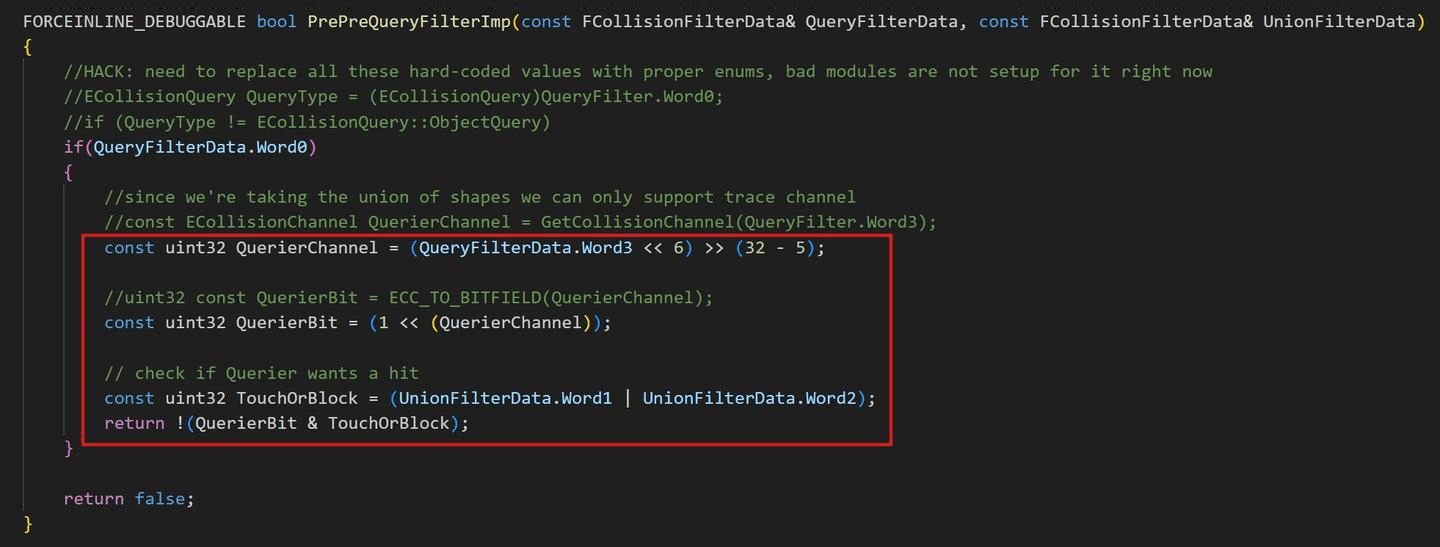
注意这里的函数名是PrePreQueryFilter,说明后面还有PreQueryFilter流程。
射线和各种几何体相交判断
第三道,真正的射线和几何体相交检测。
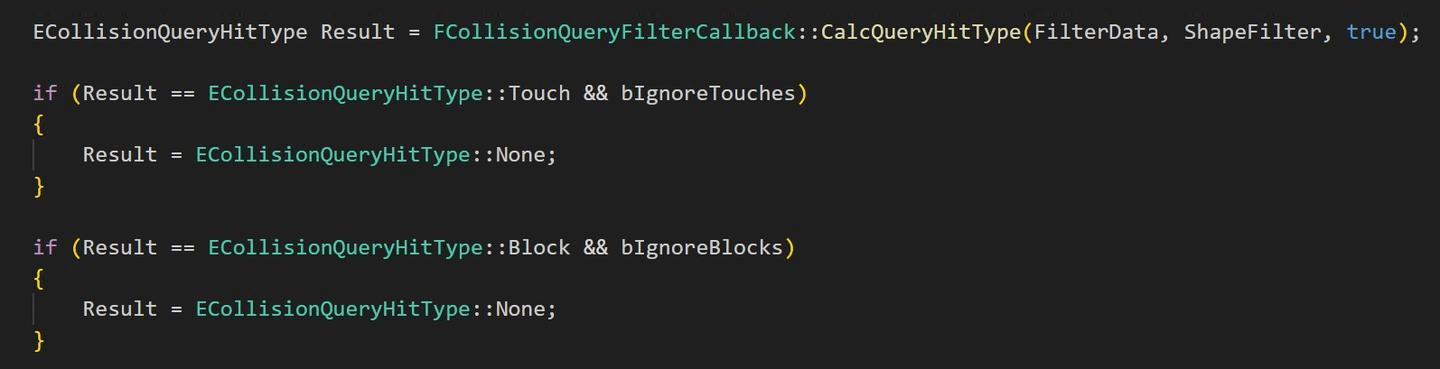
PreQueryFilter
几何检测前,先执行一些自定义逻辑的Filter做过滤,判断是否要做对Shape的射线检测,可以做游戏业务相关的操作。注意到例子中的射线检测是按照LineTrace BlockChannel做的,但目前OverlapChannel的Shape也还没被排除,排除操作就是在PreQueryFilter阶段做的,实际会调用FCollisionQueryFilterCallback::PreFilterBaseImp函数。
首先对比查询的Channel,和Shape的OverlapChannel & BlockingChannel,判断这次查询是Touch还是Block,称为CollisionQueryHitType。
如果是LineTraceSingle,那么只关心BlockingChannel,TouchChannel的Shape可以忽略。
查询的Touch/Block和Shape的ResponseChannel比对通过后,再判断IgnoreActors和IgnoreComponents是否需要过滤,LineTrace时通常会设置IgnoreActors。
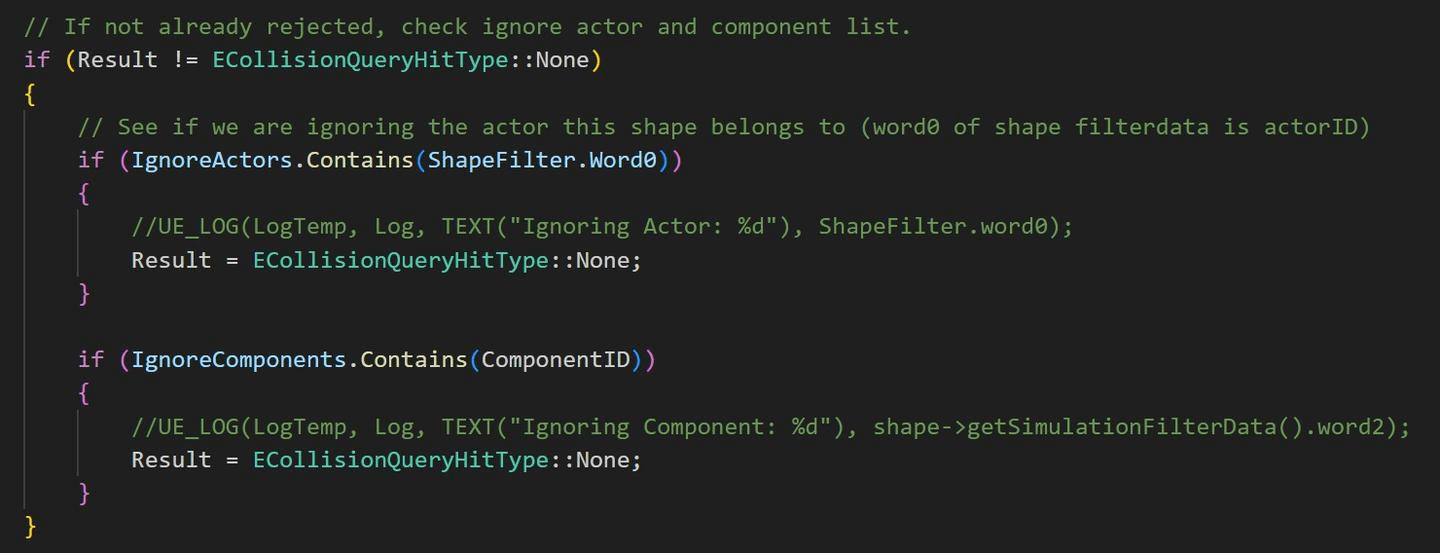
FCollisionQueryFilterCallback::PreFilter检查通过后,正式进入射线和几何体相交计算。
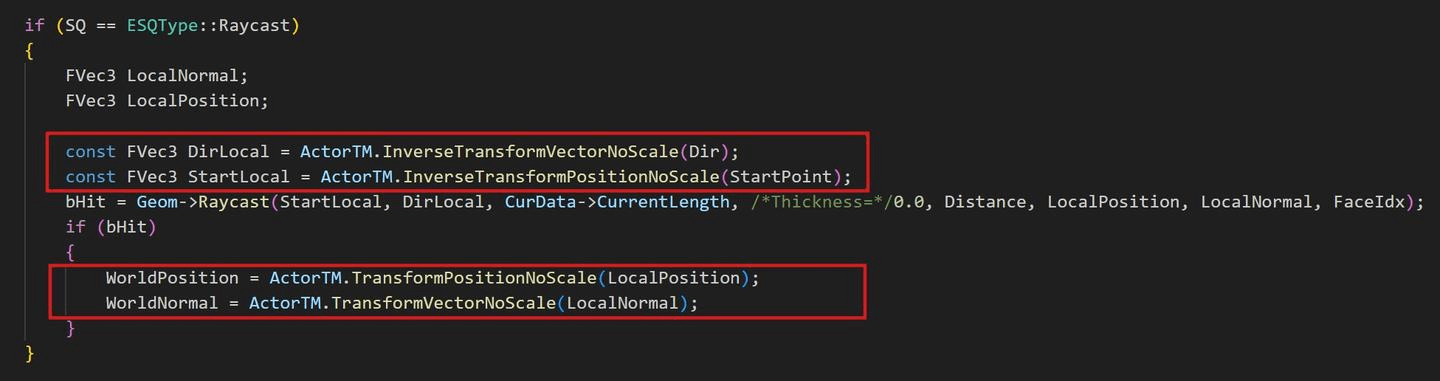
世界空间坐标和Geometry局部空间坐标
此时射线的起点和方向都是世界坐标,在检测前先变换到Geometry的坐标空间,后面计算起来会更加方便。比如对Box检测时,直接用AABB射线检测算法即可。
射线和不同几何体相交计算
这里不仅要判断是否相交,还要得到射线接触的位置,初次接触几何体的距离,以及接触点的法线。每个几何体都实现了Raycast函数,观察不同几何体的实现。
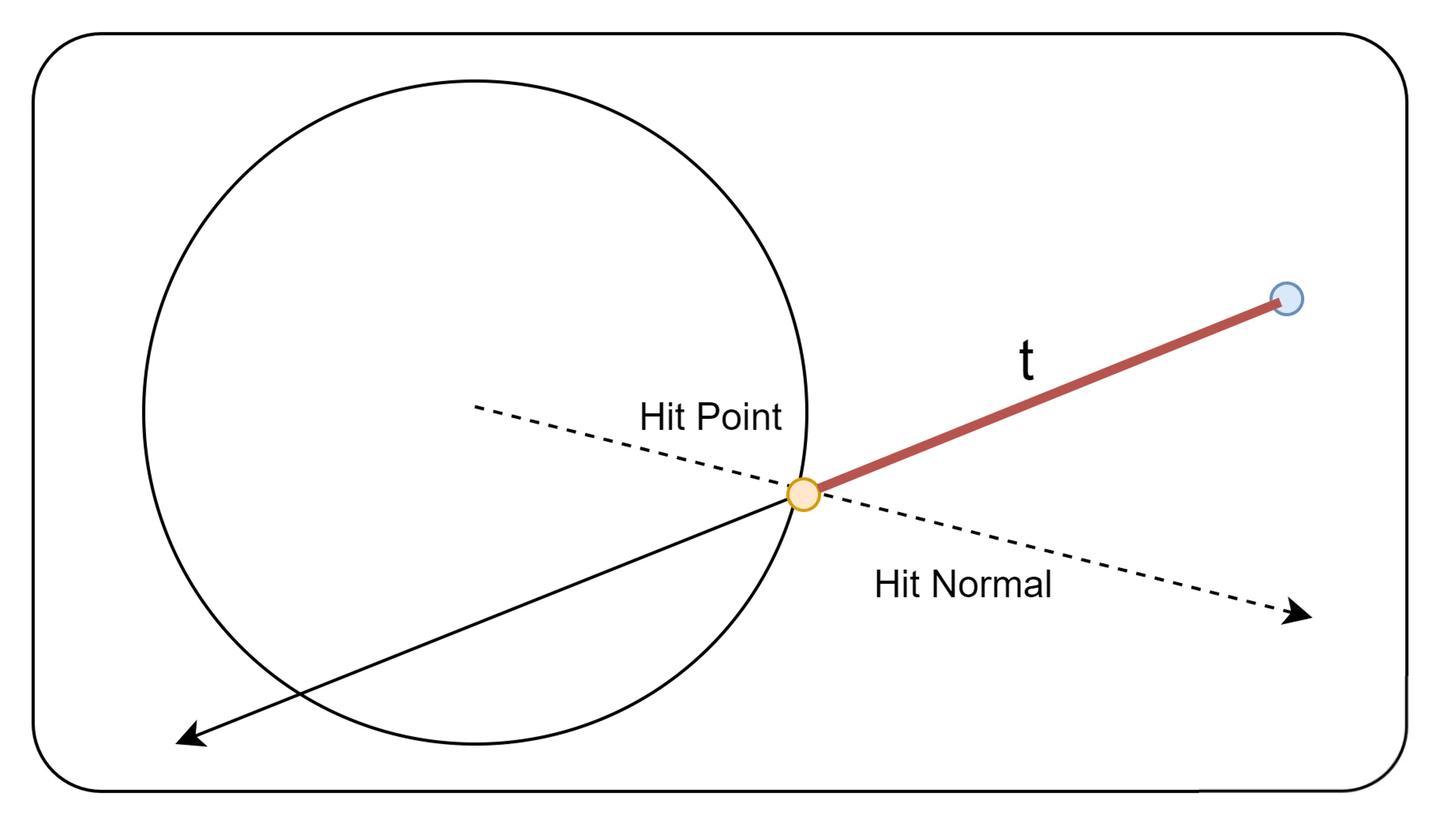
TSphere
球形判断是最简单的。
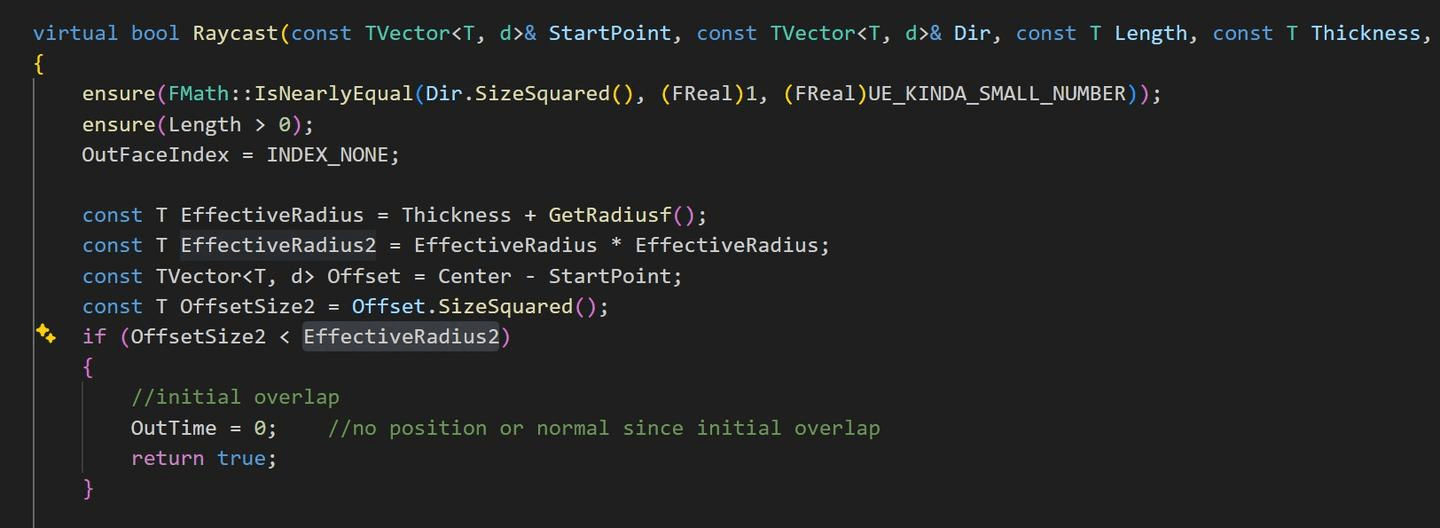
令直线起点为P,方向为dir,直线方程为:
设圆心为C,半径为R,直线和圆相交,需要满足以下方程:
这是关于t的一元二次方程,用公式求出t即可。
有了时间t,就能快速求出交点坐标和交点法线了。
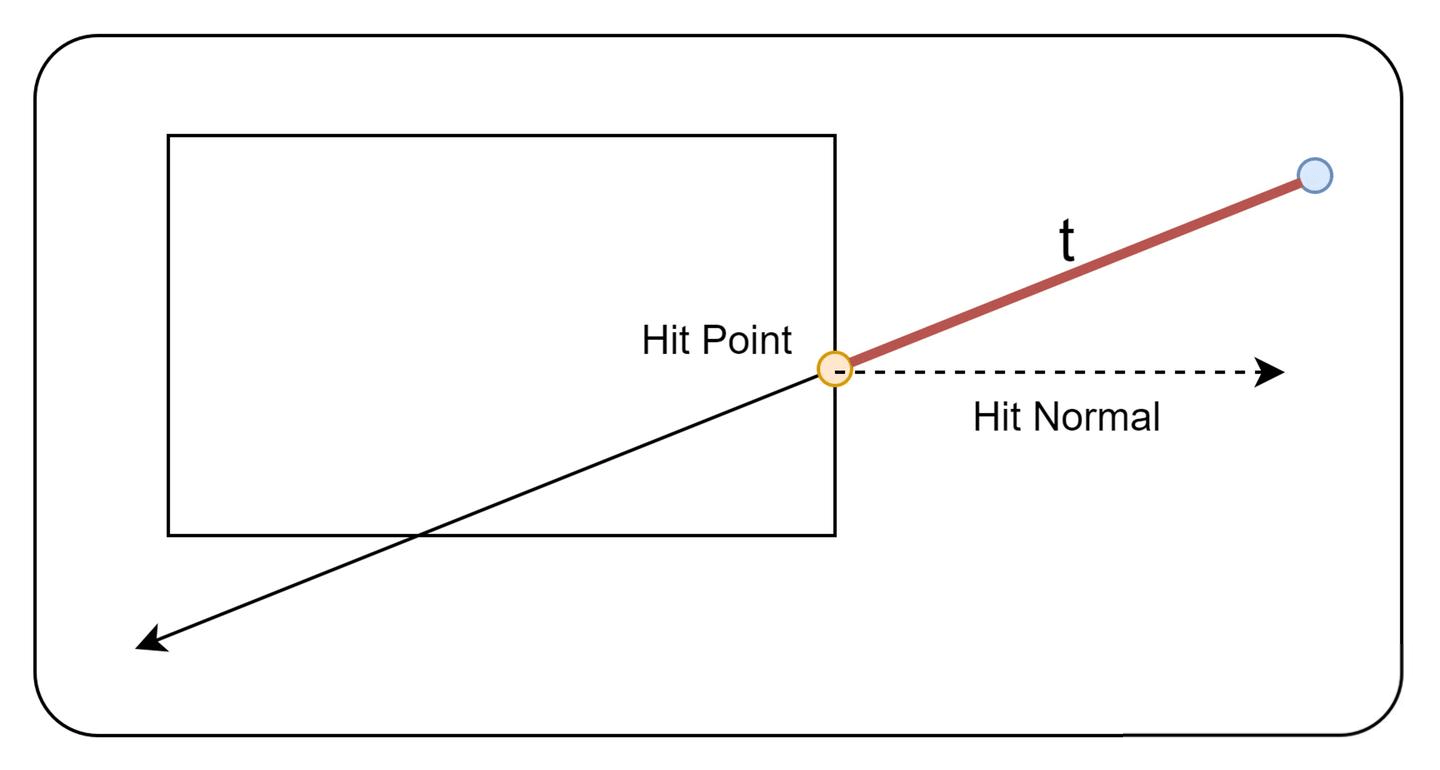
Tbox
最终执行的AABB,计算开销比球体高些。

对于三组Slab,都分别计算进出时间t0、t1,然后取交集,得到时间t,再得到交点。法线总是XYZ三个方向,计算t0属于哪个面即可。
FCapsule

Capsule可以想象成,到线段最短距离为r的点,形成的距离场,线段作为Capsule的轴心。
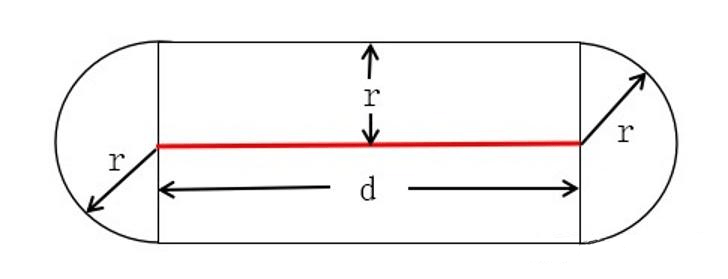
那么判断射线和胶囊体是否相交,计算这个轴心线段到射线的最短距离即可,具体计算上,需要找出一对距离最近的点。
真正困难的地方在于,线段上的最近点,位于线段中间。直接贴一个已有算法,核心是找出两个平面的相交线,理解起来需要点时间,但计算步骤并不多。
参考:
https://johnmayhk.wordpress.com/2012/02/02/shortest-distance-between-two-skew-lines/
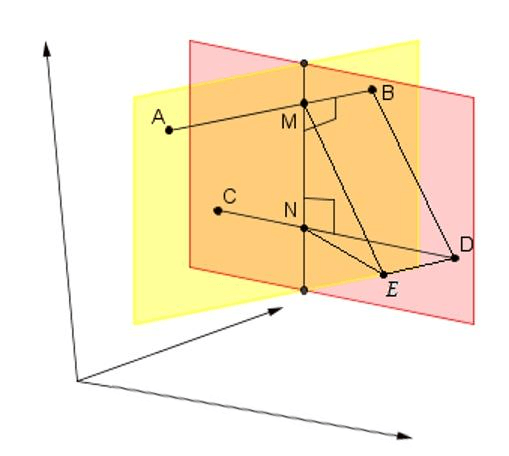
如上所示,最短距离就是BD在MN上投影的长度,而MN同时垂直AB和CD,另外ABXCD得到的向量也同时垂直AB和CD,因此MN与(ABXCD)平行。由此可得到最短距离。
有了距离,就能解出两个点了。
UE也实现了这个算法,封装于SegmentDistToSegmentSafe函数,主要步骤如下:

当射线与Capsule相交后,还需要进一步求交点和normal。
分两种情况:
- 与上下两个半球相交,normal从球心出发
- 与中间圆柱体相交,计算圆柱体的normal
FConvex凸包
最复杂,使用了GJK算法,不再展开

和Shape发生碰撞后怎么办?
当前的Hit类型是ChaosInterface::FLocationHit,先填充Hit的这几个属性:
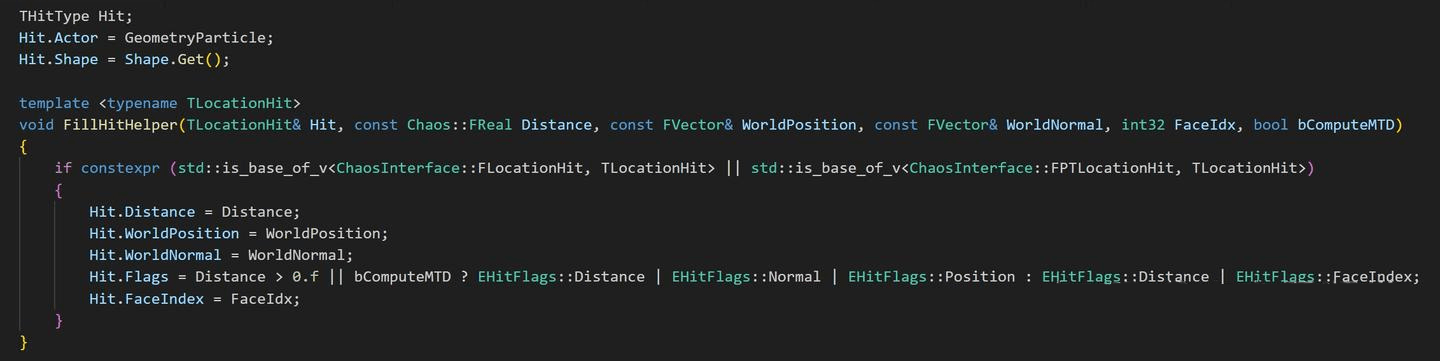
之后再给个机会执行FCollisionQueryFilterCallback::PostFilter,如处理bDiscardInitialOverlaps过滤等。
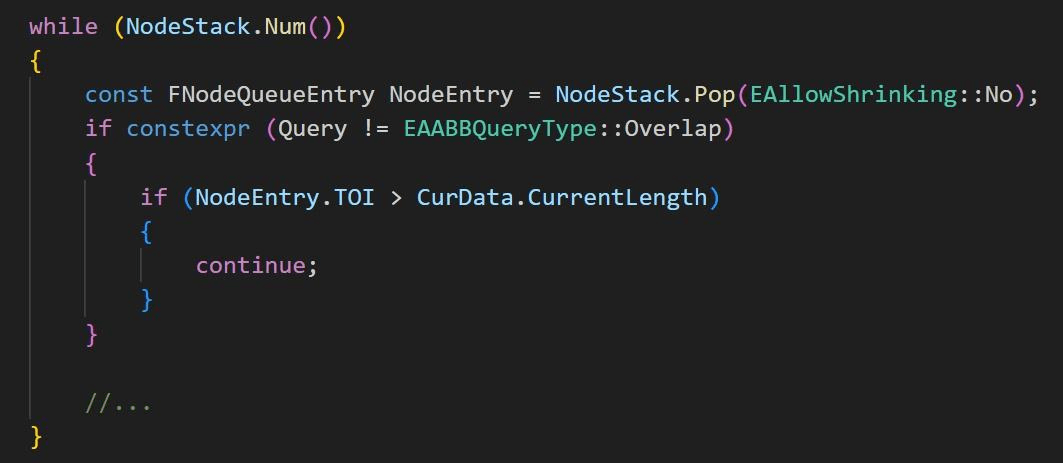
然后把Time作为Distance记下,表示射线已经打了多远,对后续Shape做射线检测时,将从最新的Distance开始,继续往后打射线。
回到AABB子树的遍历,如果要判断多个子树,但射线在之前已经Block了,就不用判断之后的子树了。
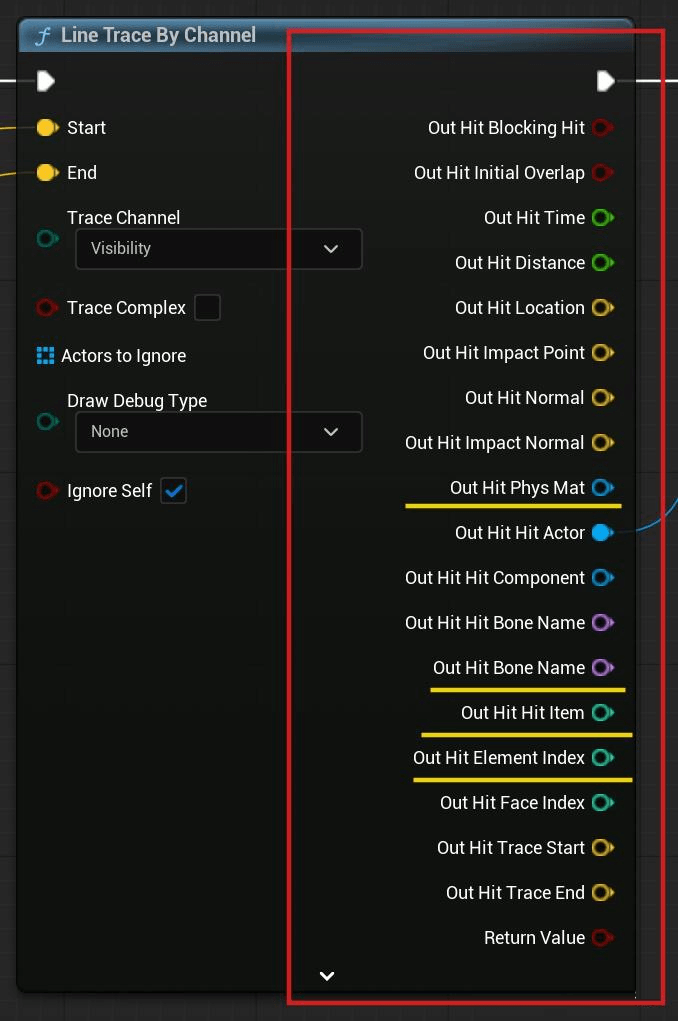
FHitResult的填充
FHitResult展开后有如下属性,其中大部分在之前射线发生碰撞时已经可以得到,只有黄线画出的几个需要看下如何获取。
PhysMat
命中点的物理材质,物理材质可以理解为类似渲染用的材质,只不过描述的是物体表面的摩擦力、密度等属性。当前已经有了FaceIndex,而Geometry中记录了FaceIndex和PhysicsMaterial的对应关系,因此可以得到PhysicsMaterial。

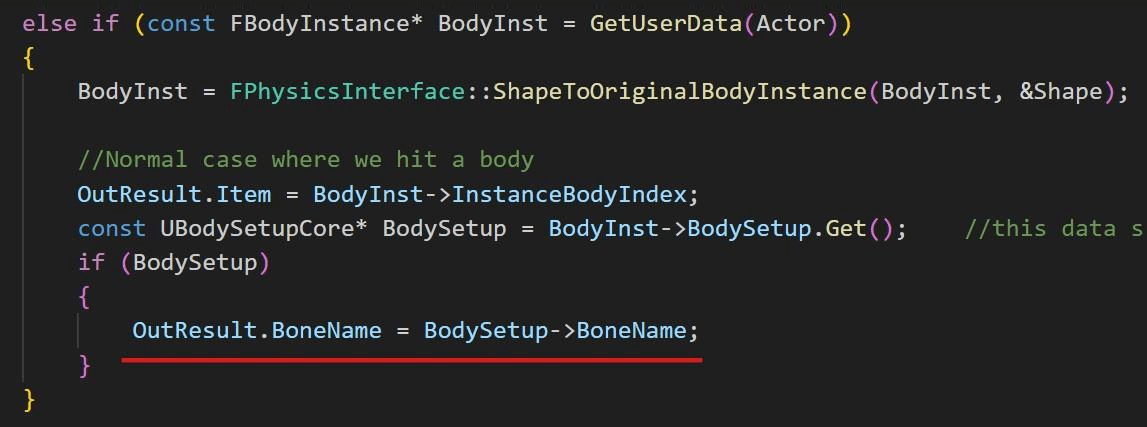
BoneName
命中点所属骨骼的名称。
对于示例中的StaticMesh,是没有骨骼的,因此是None,只有对于SkeletalMesh,这个BoneName才有意义。
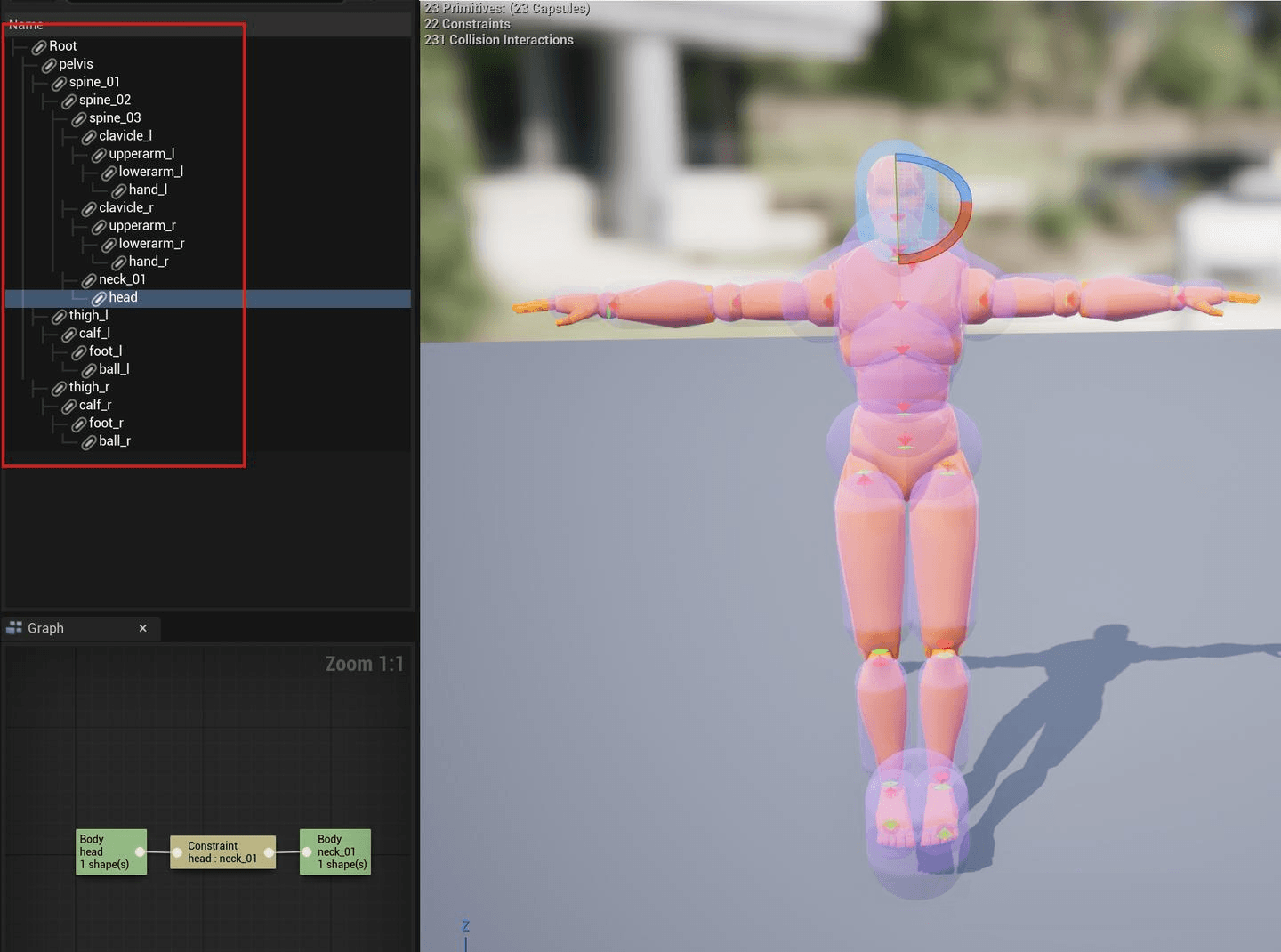
观察SkeletalMesh的PhysicsAsset,多个骨骼上会挂接RigidBody,它们有各自对应的BodySetup,BoneName就存在BodySetup里。射线检测时,可以根据命中的GeometryParticle获取到BodyInstance,再获取到BodySetup,最终得到BoneName。
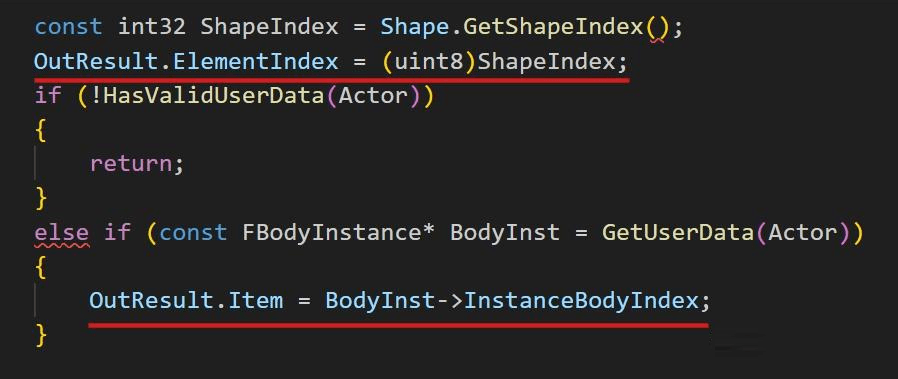
HitItem & ElementIndex
都属于一些Extra数据,不太重要。
HitItem是BodyInstance在整个PhysicsAsset中的序号,针对SkeletalMesh的情况。ElementIndex是Trace中Shape在Geometry的Shape数组中下标。对于示例中的StaticMeshComponent,它们都是0。
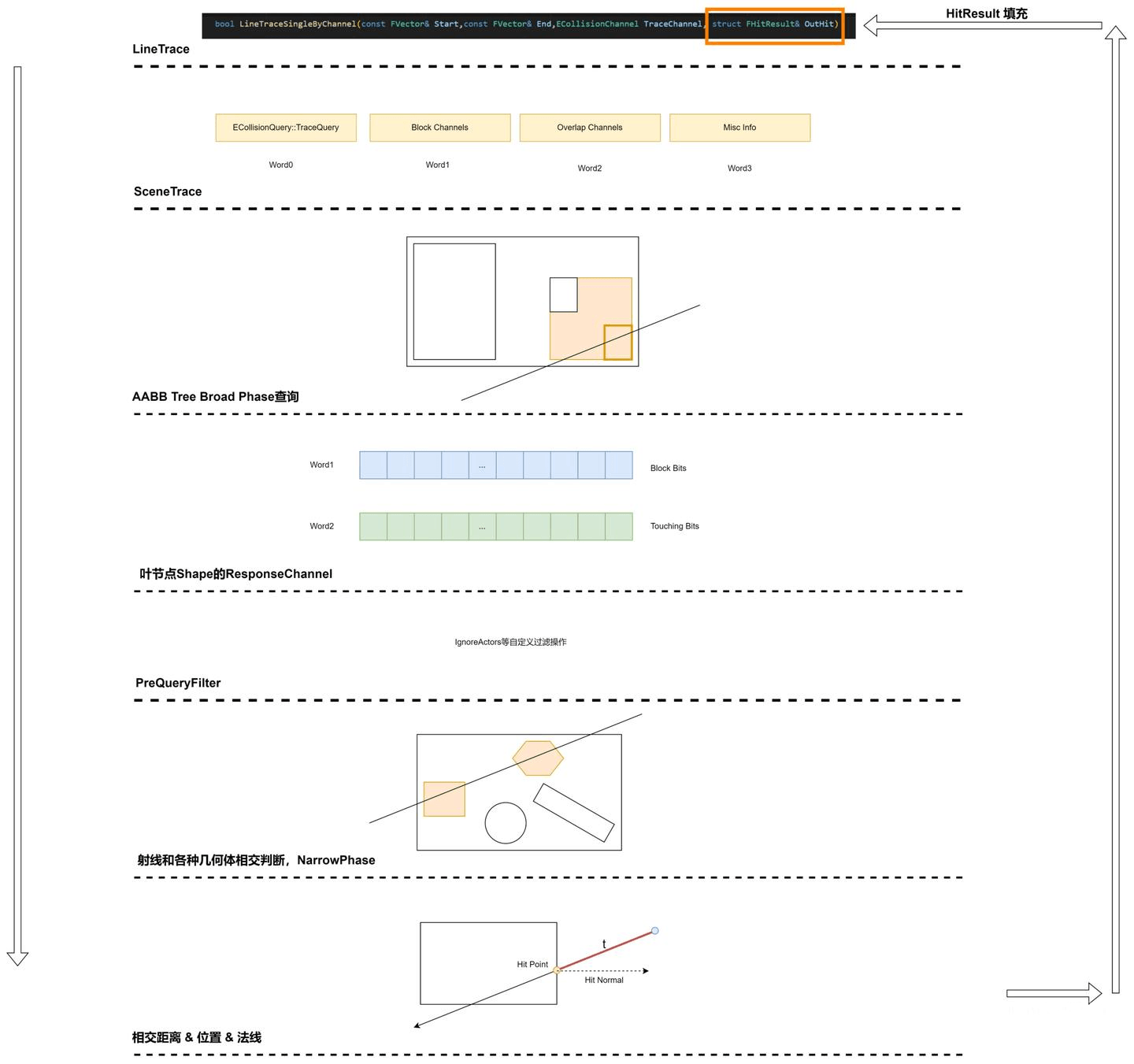
完整的LineTrace流程如下:
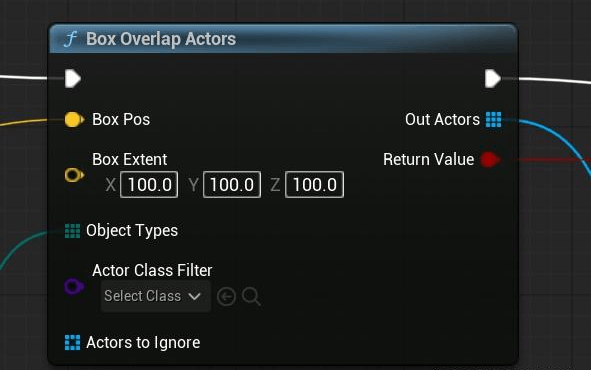
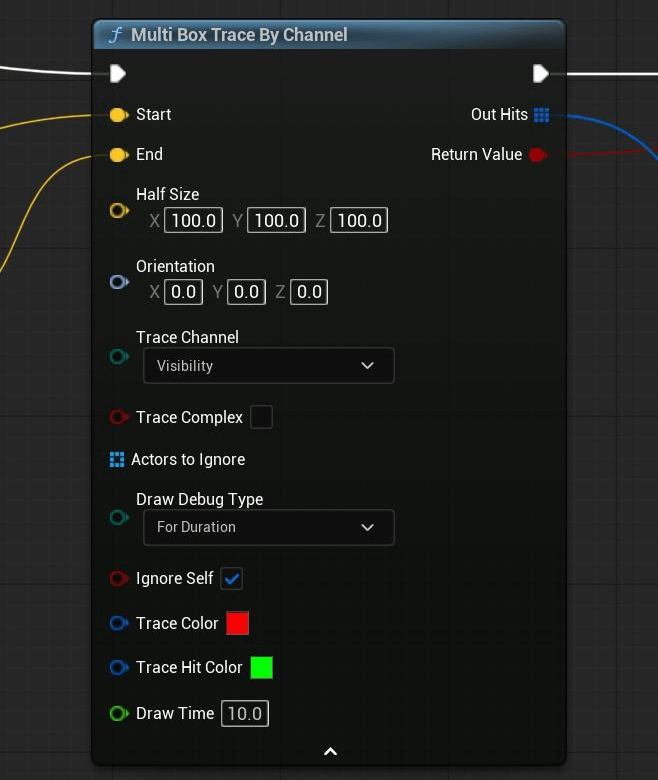
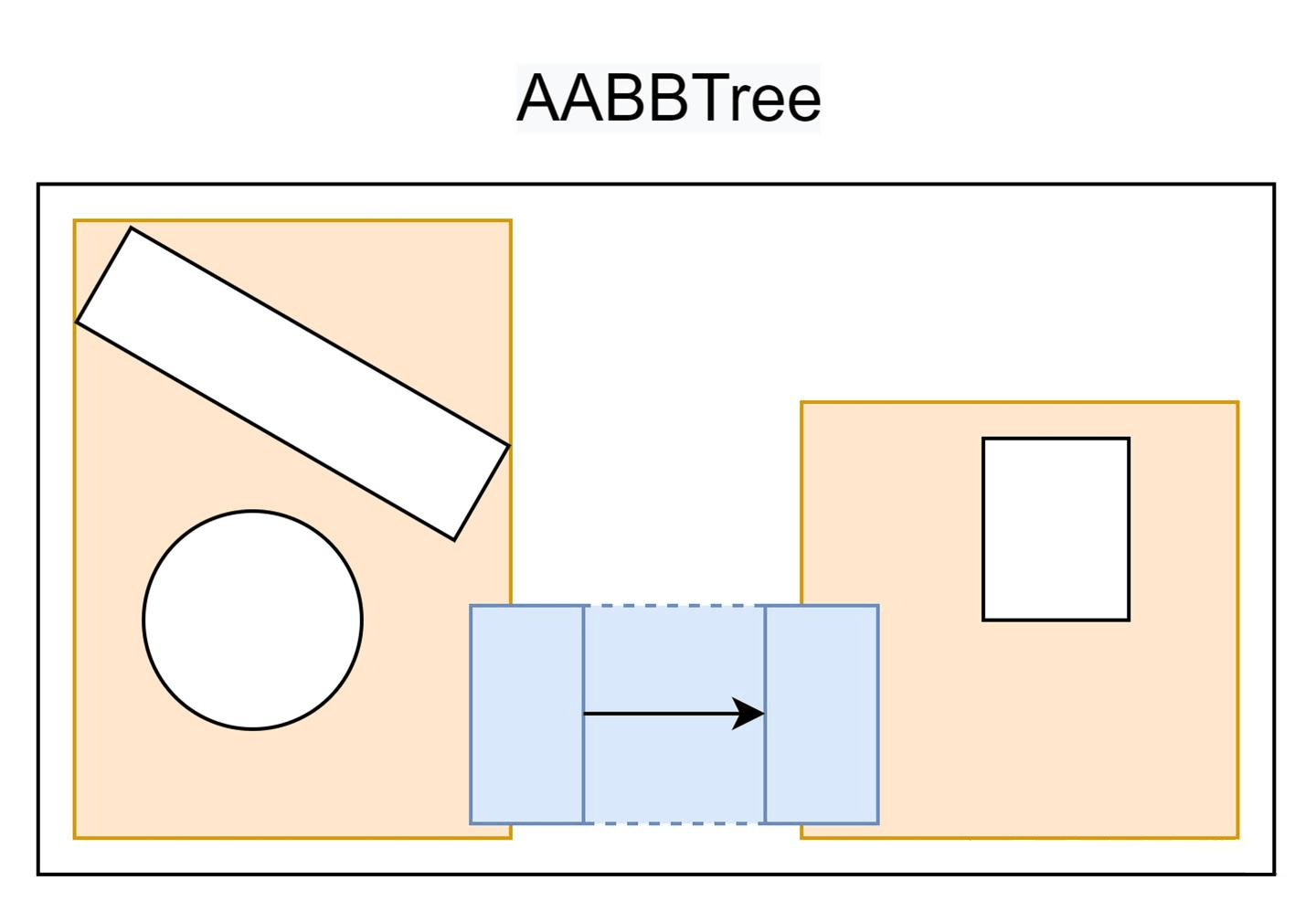
Overlap检测
第二种碰撞检测是Overlap检测,比LineTrace更复杂些,会判断一个体积内有没有和其他物体相交。这里以Box碰撞体为例,需要传入Box的位置和大小,区别于之前的LineTrace使用TraceChannel,这里使用了ObjectTypes,查询Box范围内重叠的其他Actor。但对于物理引擎而言,TraceChannel和ObjectTypes本质都是一样的,都是CollisionChannel。
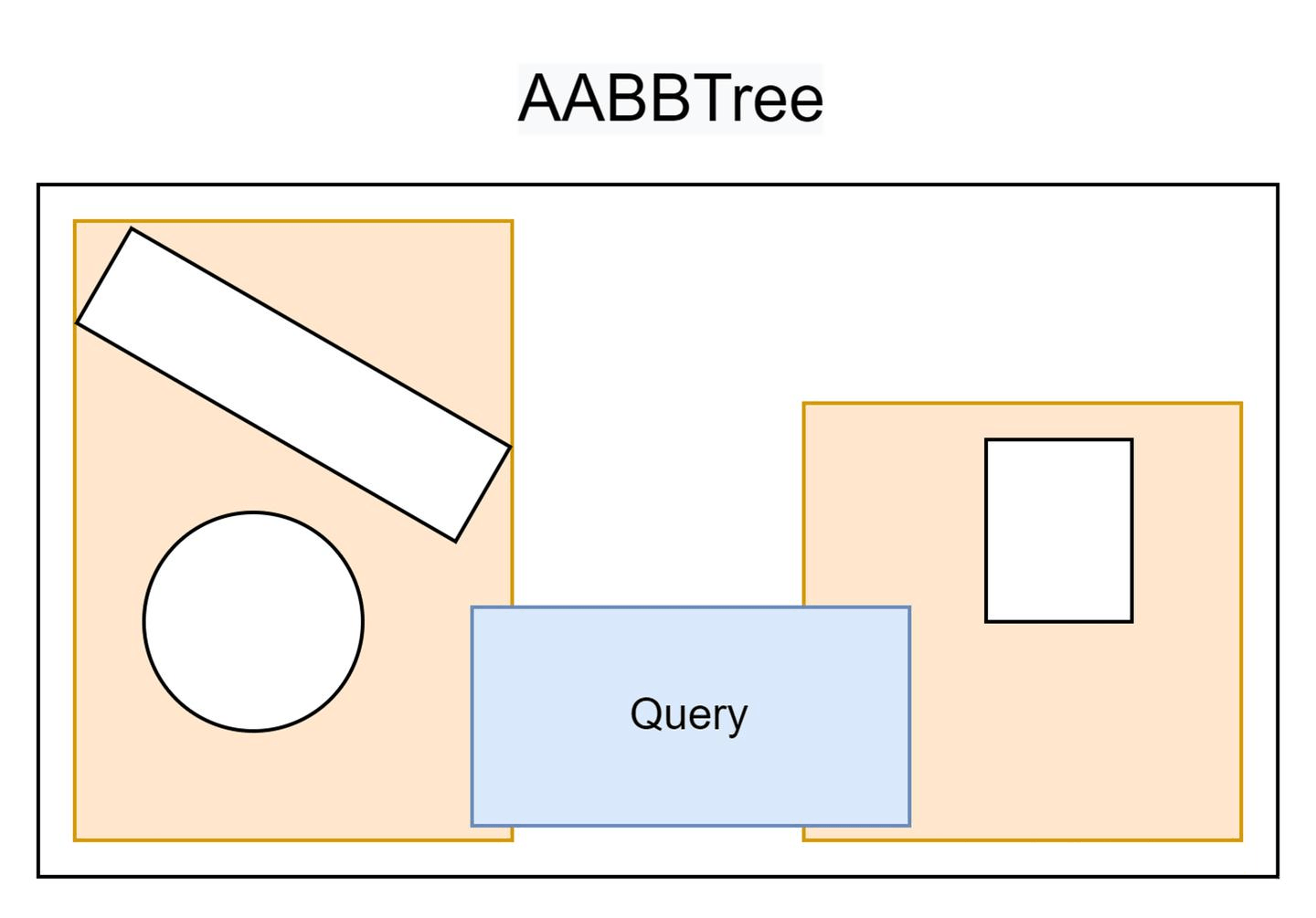
首先,把查询的Geometry计算一个AABB包围盒,传入AABBTree做BroadPhase的检测。

AABBTree的左右子树Overlap
对左右子树分别做AABB的碰撞检测。

Leaf节点的处理
TAABBTreeLeafArray.OverlapFast
对Leaf中每个Payload Geometry,同样先做AABB碰撞检测。用了SIMD技术,四个Payload为一组。当AABB检测通过后,依然先执行PrePreFilter,做Channel之类的判断,再针对具体的Geometry Shape形状,做Narrow Phase的Overlap检测。
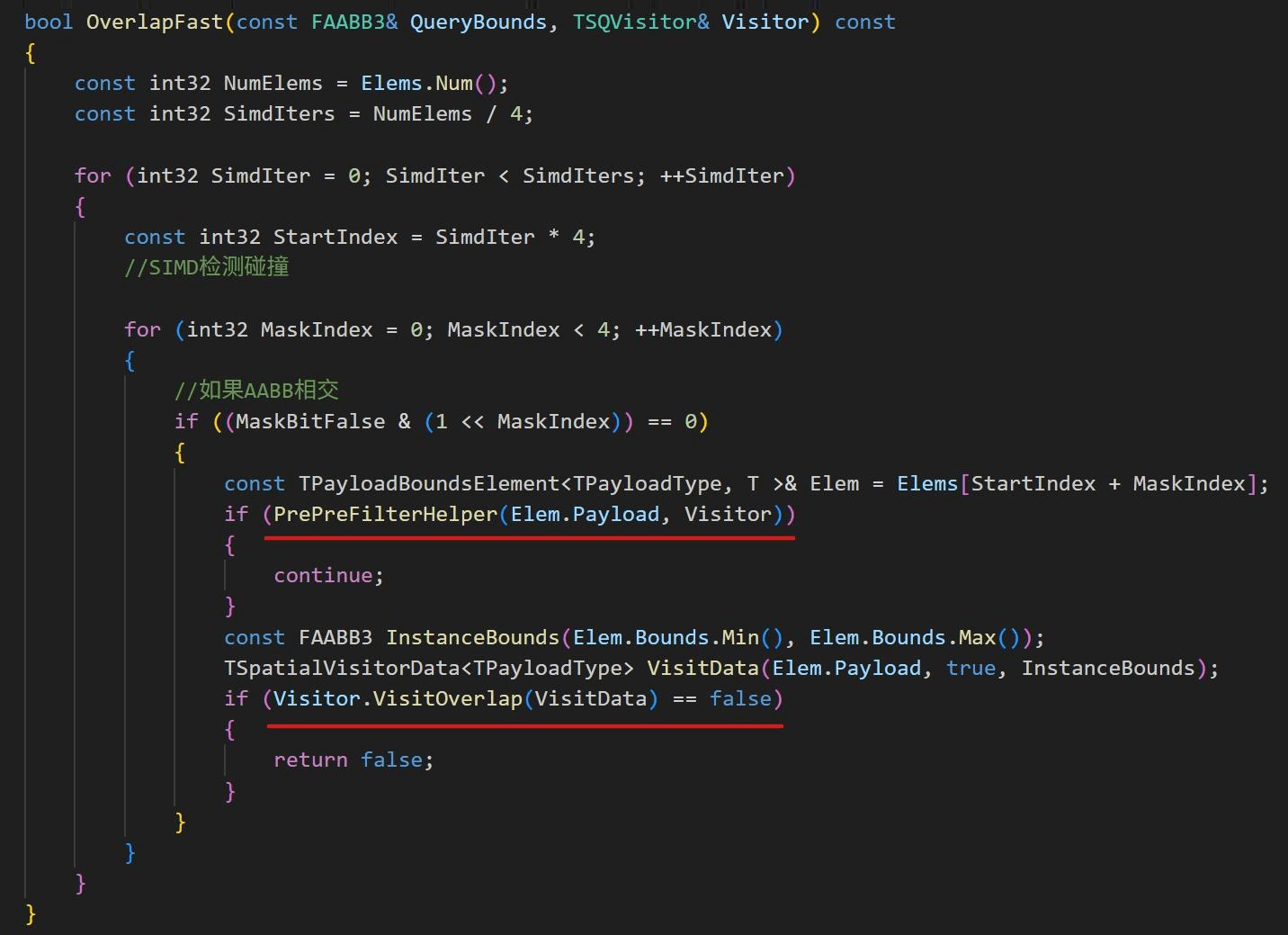
Shape可以有Sphere、Box、Capsule、凸包等各种几何形状,但它们都属于凸包。要判断两个凸包是否Overlap,就要用GJK算法,UE的实现是GJKIntersection函数,自然也是SIMD实现。

GJK算法
关于GJK算法的详细介绍,可以看这里:
总体过程是不断通过Support函数,在两个凸包上找一对点,计算闵可夫斯基差,然后让形成的三角形包含原点。GJK算法有点复杂,不展开了,但不同Shape的Support函数实现可以看下,具体就是每个Shape的SupportCore函数。
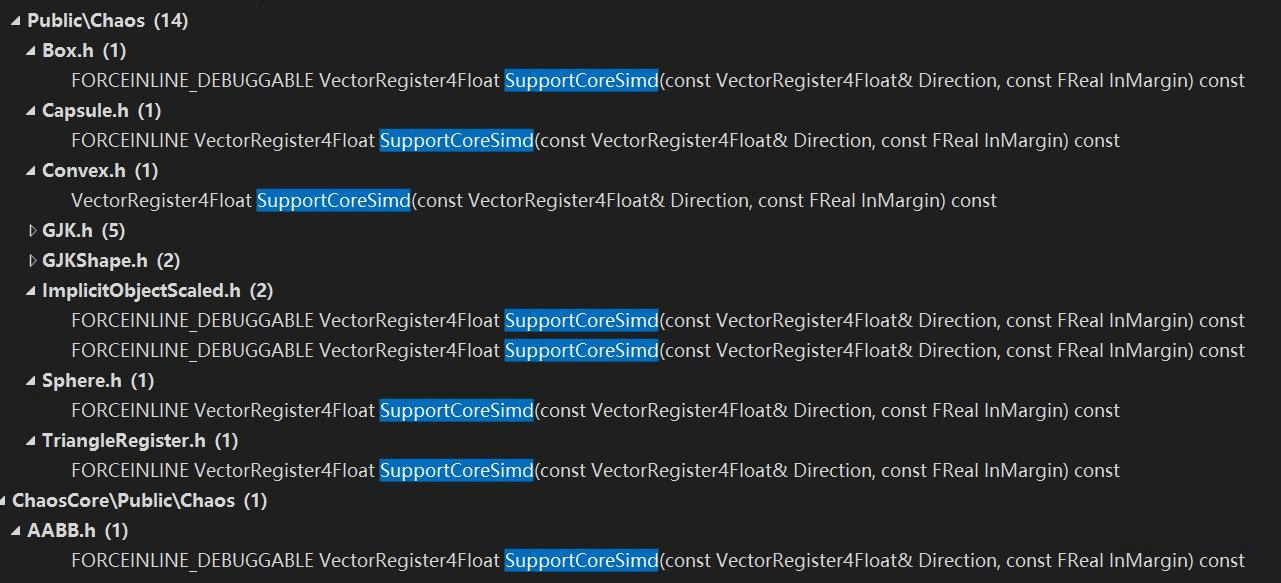
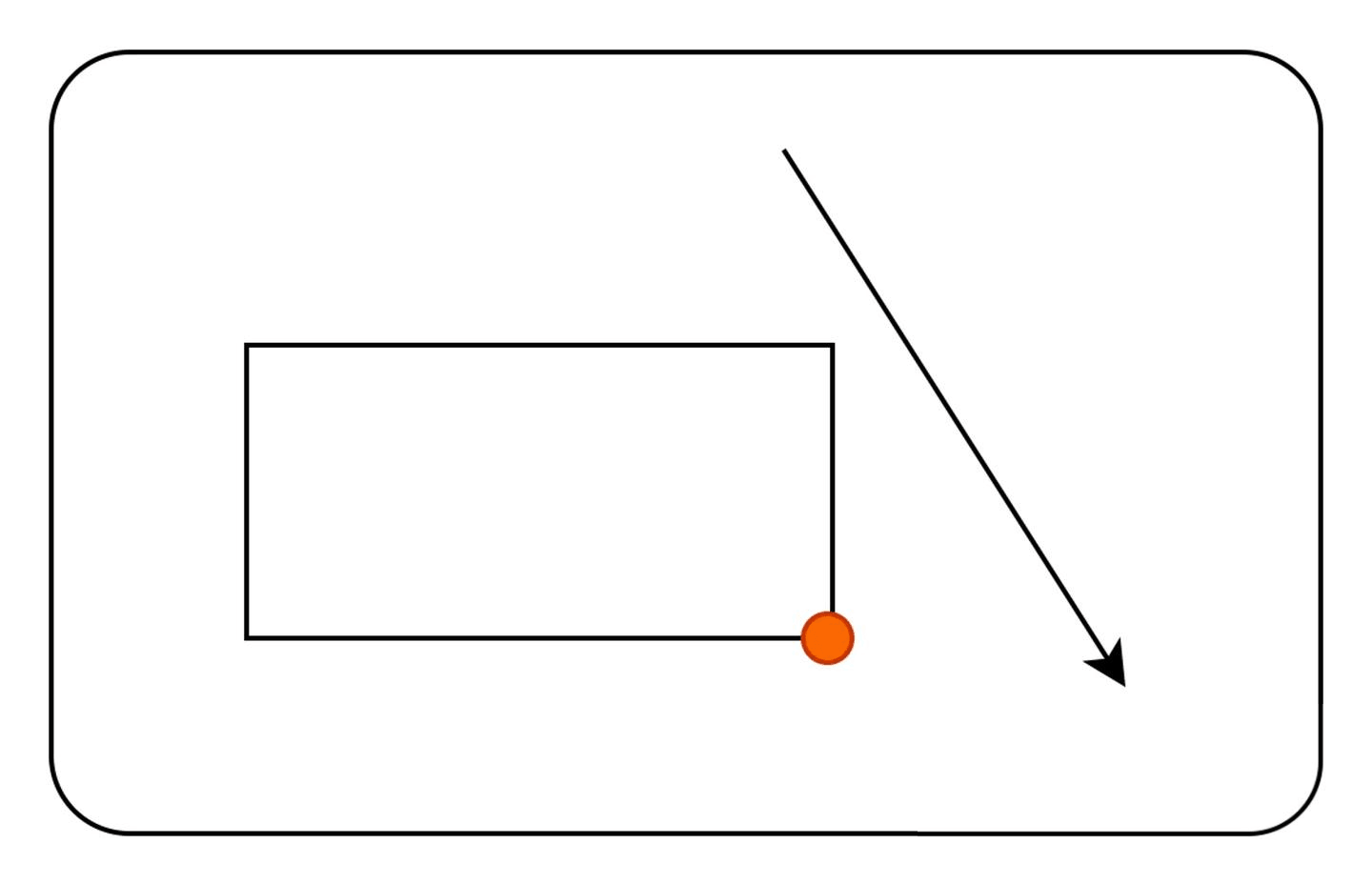
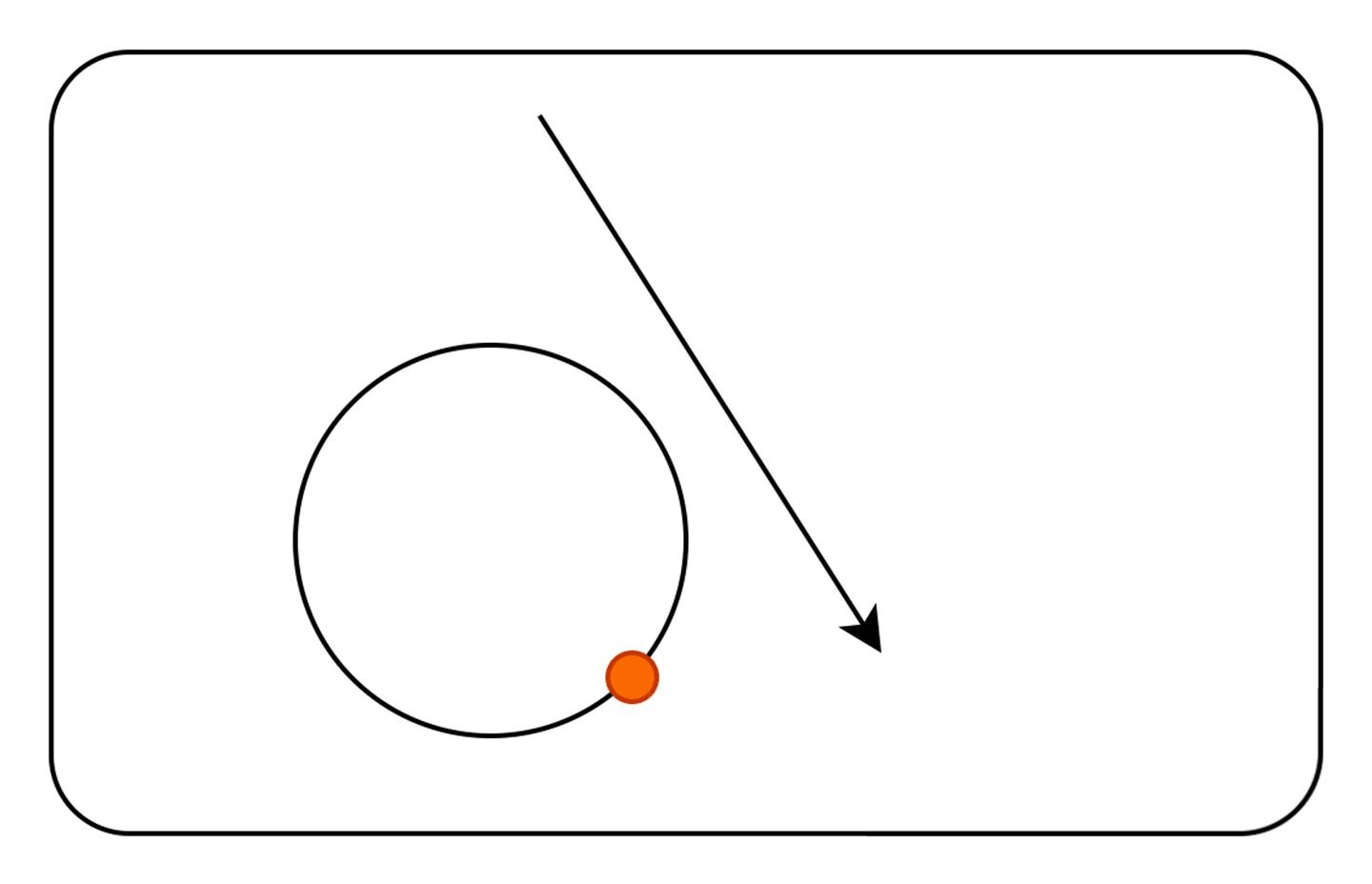
所谓Support函数,就是给定一个方向,找到Shape在这个方向上最远的一个点,下图就是两个例子。
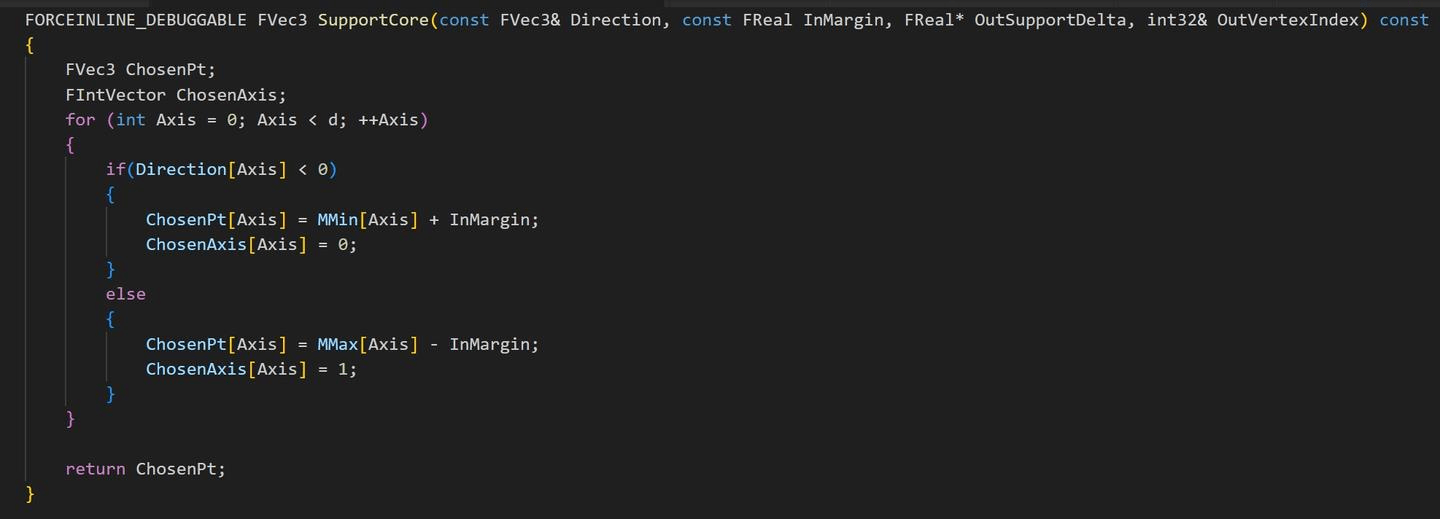
简单起见只看SupportCore普通版本,SIMD版本思想类似。
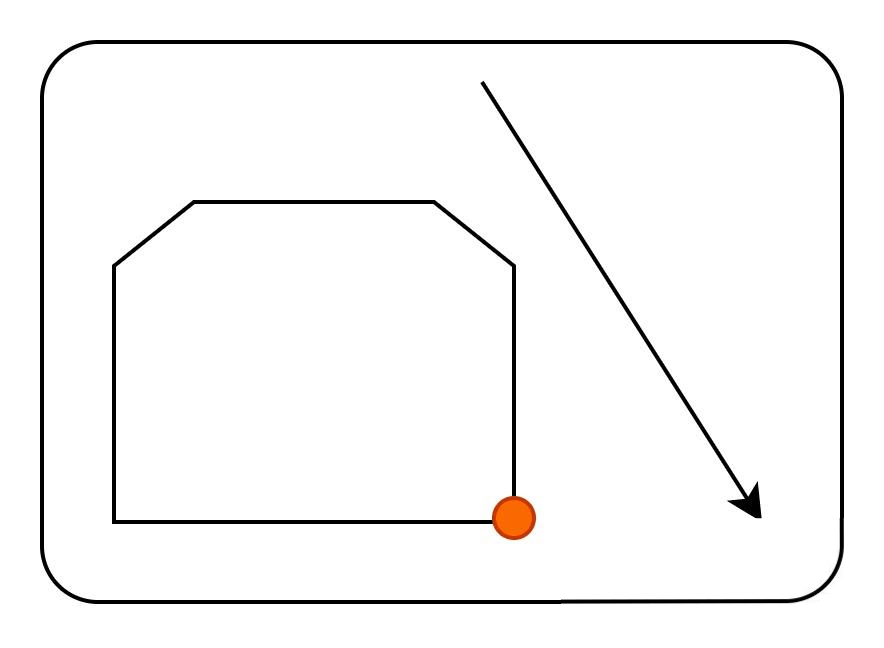
TBox
等价于对一个AABB求Support点。不难理解,AABB在某个方向上的最远点必定是8个顶点之一,因此只要依次判断三个轴,做三次方向二分即可,2^3 = 8。
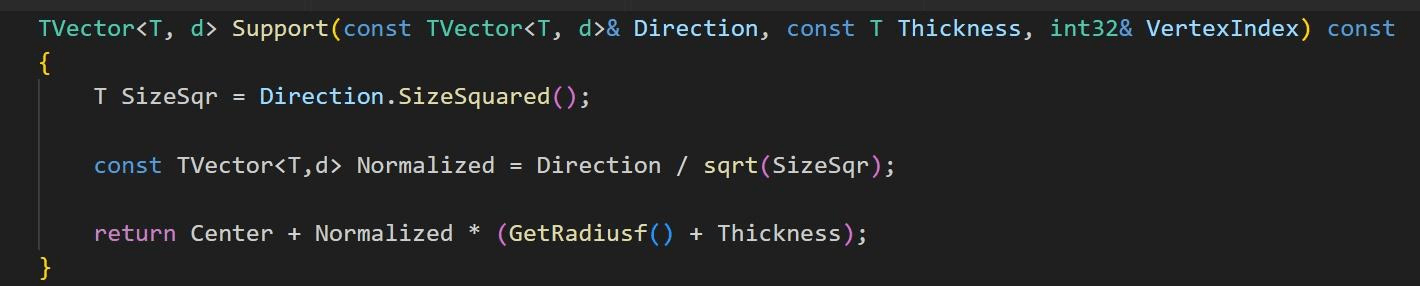
TSphere
最简单,球的中心加上半径*方向即可。
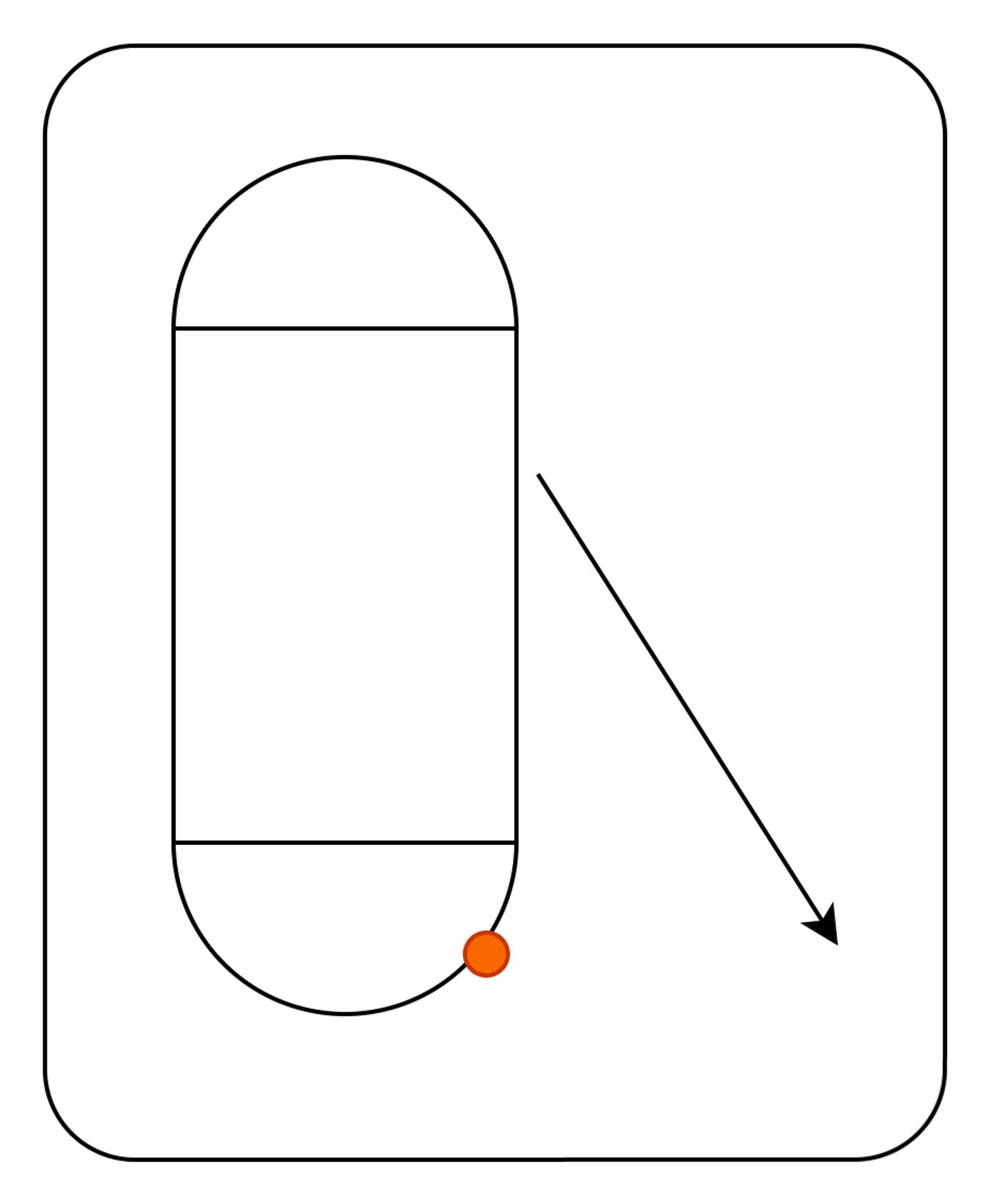
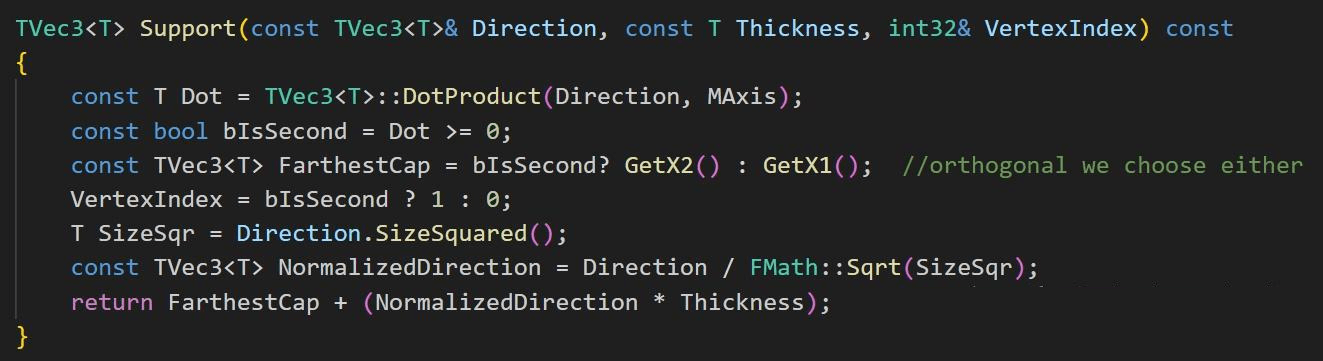
FCapsule
看似复杂,实则和Sphere一样简单。Capsule的Support点必定出现在两个半球上,因此首先根据Direction方向确定是哪个半球,然后类似Sphere处理即可。
FConvex
需要遍历所有凸包的顶点,与方向做点乘,找到最远的点。
这里实现也比较有意思,寻找凸包的Support点,理论上用启发式的“爬山法”更快,即从上个Support点往后找邻接点,不用遍历所有顶点,而且UE是保存了边的连接关系的:

那为什么不用爬山法?个人猜测是以下几个原因:
- 直接遍历Vertices数组,CPU Cache更友好,在顶点数量不多(也是大部分情况)情况下可能更快。
- 爬山法需要记录上一次的Support点序号,但碰撞检测可能多个线程并行,这样就需要为每个线程都记录一份上次的Support点了,实现有点麻烦,而且得保证线程安全。
如果要得到Overlap深度,就要使用GJKPenetration算法, 结合了GJK与EPA,这里不展开了。
Sweep检测
最复杂的情况,以Box Sweep为示例,会得到Sweep路径上发生重叠的物体。
BroadPhase
类似Overlap,但把Sweep经过的整个路径,作为AABB,查询与左右子树的碰撞情况。

NarrowPhase
对于Leaf节点中的每个Geometry,同样经过PrePreFilter,AABB检测,PreFilter。
对Geometry中每个Shape的Sweep检测,最后依然使用GJK算法。

如果是TriangleMesh复杂碰撞怎么办?
首先,Shape就变成了FTriangleMeshImplicitObject,类似Mesh,没有凸包的限制,可以表示任何形状。因此,类似GJK这种精妙的几何碰撞算法都不再适用,只能回归最原始的三角形相交判断。
Raycast & Overlap & Sweep
BroadPhase相同,使用AABBTree。
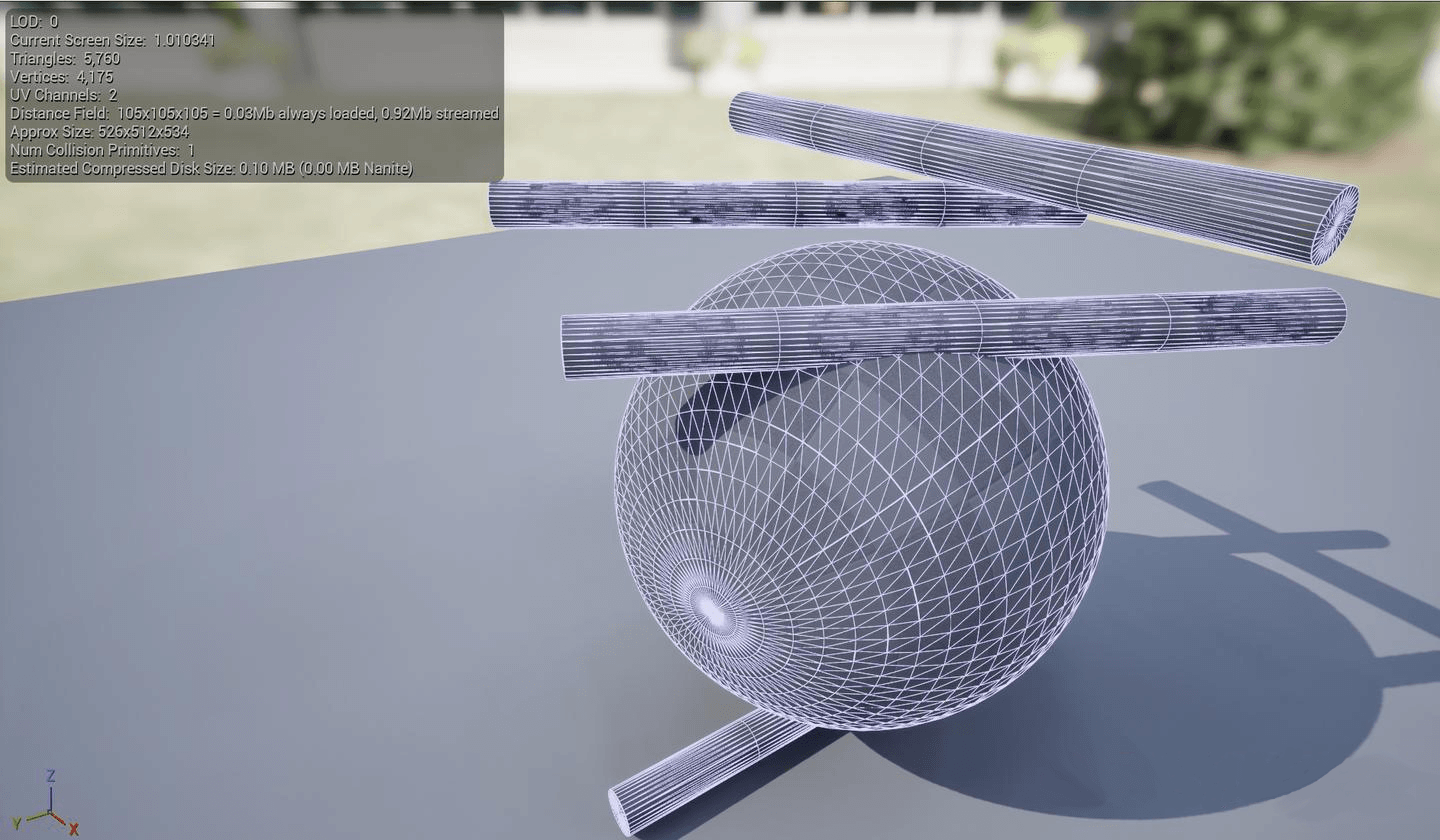
NarrowPhase不使用GJK算法了,而是每个TriangleMesh自己有一个BVH树,用BVH的碰撞检测方式。BVH子节点存储了三角形,在检测子节点内部碰撞时,采样逐三角形检测方式。
比如这个例子,BVH树有379个节点,模型总共有5760个面,还是非常复杂的。
Tips
综合上述碰撞检测流程,可以对物理场景优化做一些指导:
- 游戏中物体都设置专门的Simple Collision,避免查询复杂碰撞
- Shape的碰撞检测效率排序:Sphere > Capsule > Box >> Convex >>>> Triangle Mesh,尽量用效率高的Shape做近似
- 避免太长的LineTrace,以及范围太大的Overlap和Sweep
- LineTrace查询的开销最低,玩法上尽量用它
这是侑虎科技第1977篇文章,感谢作者南京周润发供稿。欢迎转发分享,未经作者授权请勿转载。如果您有任何独到的见解或者发现也欢迎联系我们,一起探讨。(QQ群:793972859)
作者主页:https://www.zhihu.com/people/xu-chen-71-65
再次感谢南京周润发的分享,如果您有任何独到的见解或者发现也欢迎联系我们,一起探讨。(QQ群:793972859)