
Unity实现Nanite
- 作者:admin
- /
- 时间:1月21日
- /
- 浏览:2470 次
- /
- 分类:厚积薄发
【USparkle专栏】如果你深怀绝技,爱“搞点研究”,乐于分享也博采众长,我们期待你的加入,让智慧的火花碰撞交织,让知识的传递生生不息!
一、前序
1. 介绍
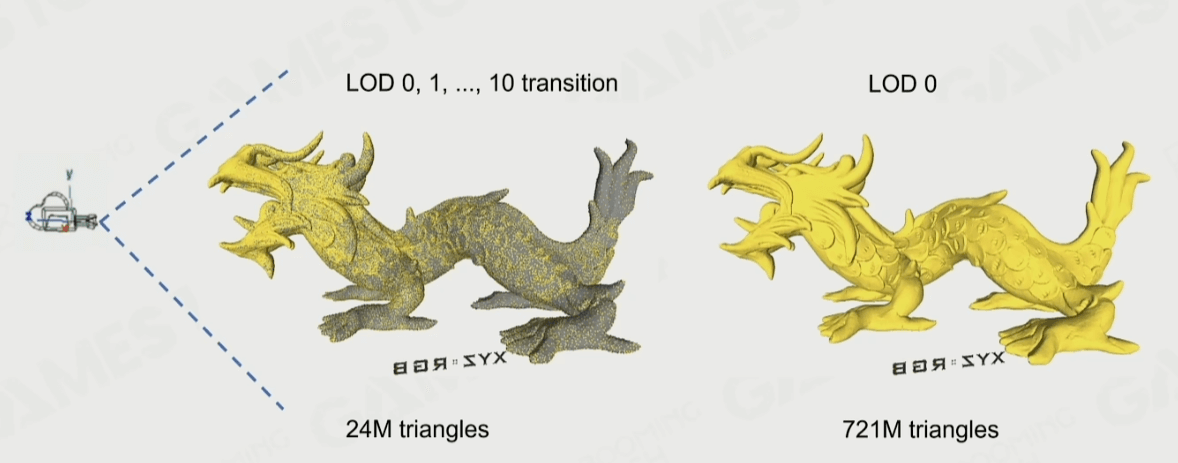
Nanite是UE5中虚拟几何体(Virtualized Geometry System)的系统,主要用途是高效率渲染的高面数模型。Nanite会为模型自动生成LOD结构,与传统LOD不同,Nanite的LOD不再是每个模型的,而是精细到模型中的局部区域,艺术家不需再为制作或处理LOD烦恼。并且还能享有GPU Driven的高效剔除,单个绘制调用的好处。
2. 技术要点
Nanite技术结合了多种技术做到了高效渲染:
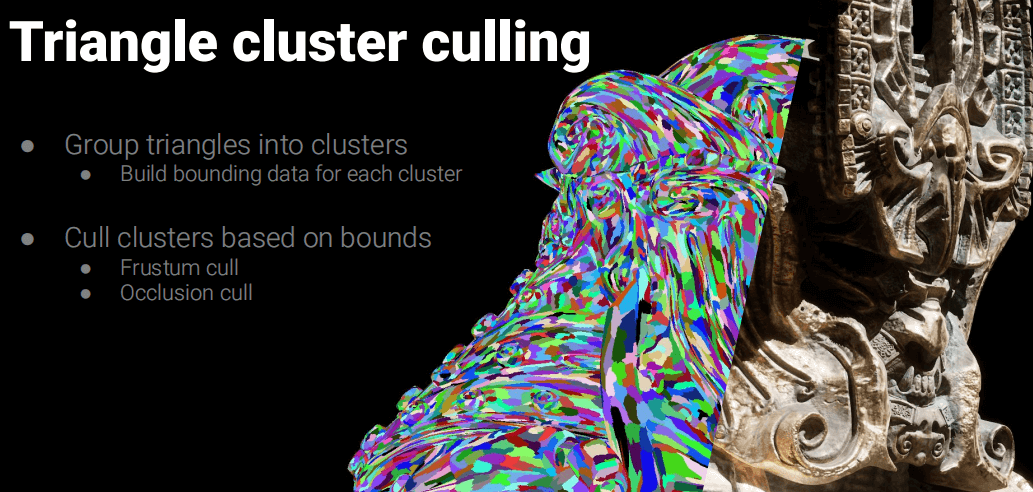
Cluster Rendering:由Cluster组织三角形,可以享有更高效的剔除。
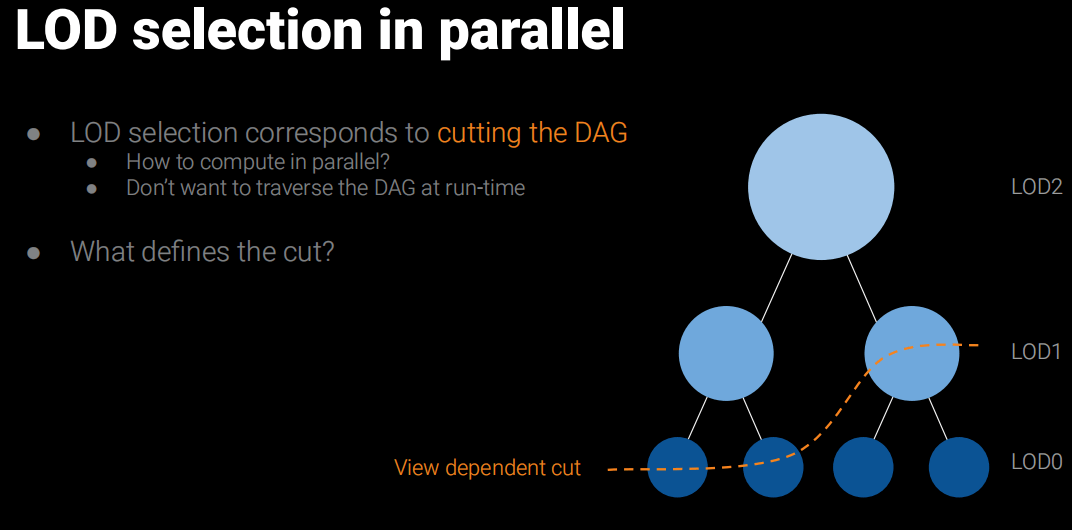
Auto LOD:通过Graph Partitioning技术划分和简化模型构建LOD,并且把数据组织成BVH结构在Runtime时候可以高效地并行选择LOD,通过这种方式构建的LOD过渡非常丝滑。
GPU Driven Pipeline:由GPU驱动的绘制,减少了CPU的性能开销。
Occlusion Culling:更细颗粒的遮挡剔除,用于剔除不可见的三角形。
Hardware/Software Rasterization:由于小三角形对于硬件光栅化非常不友好,所以针对这些三角形用Compute Shader执行软光栅提高效率。
Visibility Buffer:利用Visibility Buffer减少Overdraw,进一步提高GPU效率。
Streaming:加载只看到的相关数据,减少几何体对内存的压力。
3. 本文效果
由于Nanite系统非常庞大和有非常多的工程细节要处理,所以本文会简化和略过一些东西,仅实现核心部分,而且会与有UE5的版本有点出入。
下图是本文实现的效果,每个色块是一个三角形,可以看出LOD切换和相机剔除都非常丝滑。
色块表示三角面
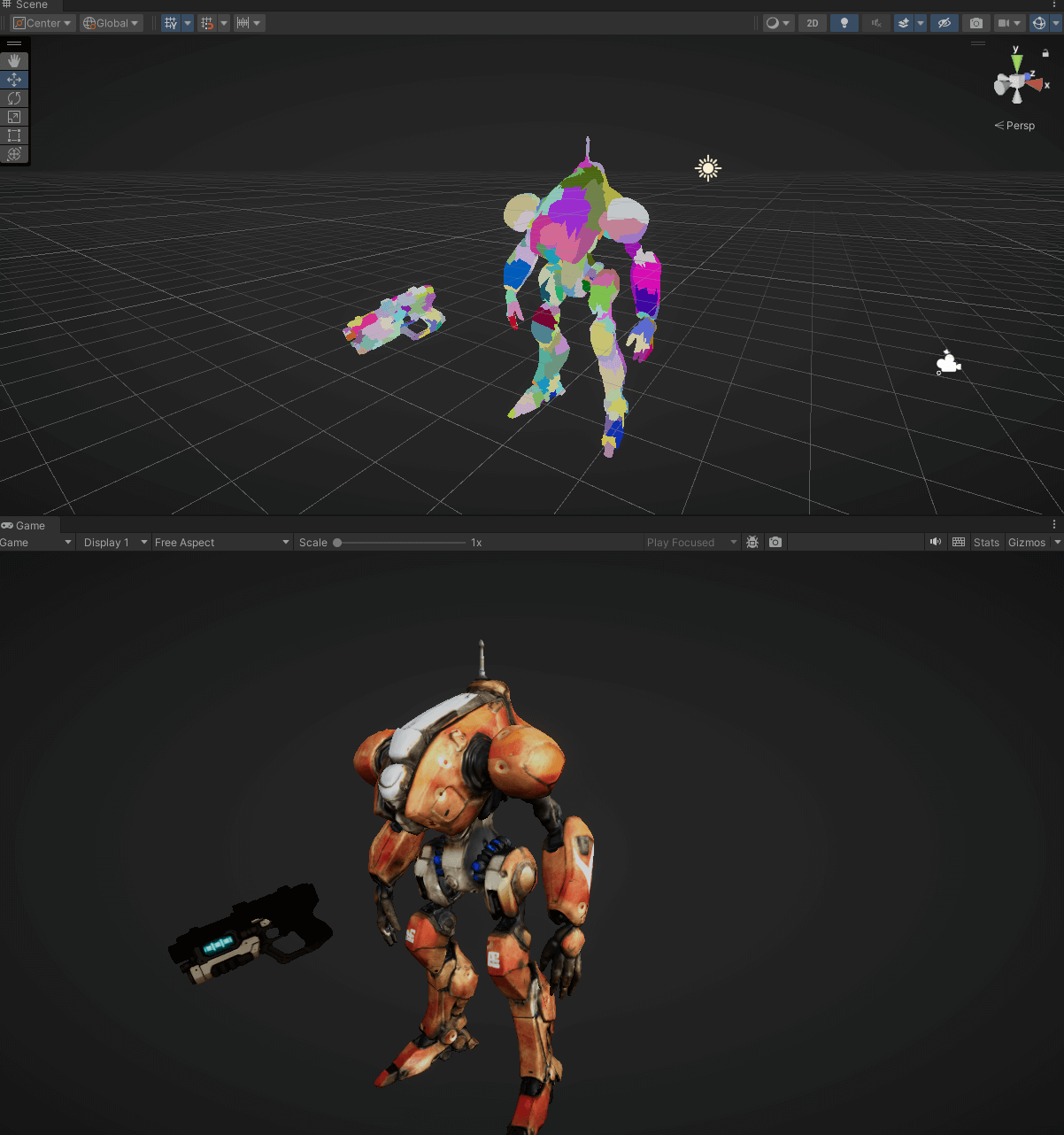
色块表示Cluster
二、实现
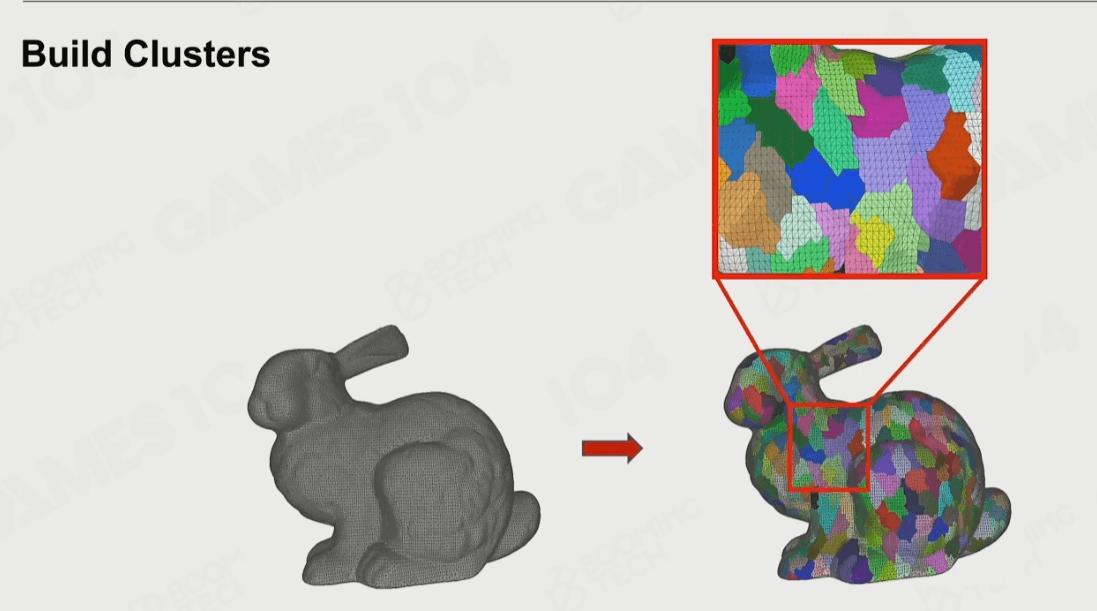
1. Clusterize
第一步,在离线阶段处理,将复杂的超高精度网格模型高效且合理地分割成更小、更易于管理的簇(Cluster),每个Cluster最多128个三角形。这种划分不是简单的切割,而是旨在最小化簇与簇之间连接的边数(即切割大小),同时保持每个簇的大小大致均衡。
UE使用的Partition是Metis库:
https://github.com/KarypisLab/METIS
实现代码可以参考UE5的源码部分:
UnrealEngine-release\Engine\Source\Developer\NaniteBuilder\Private\NaniteBuilder.cpp
本文使用meshoptimizer实现Mesh的切分Cluster和Partition功能,这个库功能还有优化Over Draw,Shadow Depth Index等功能:
https://github.com/zeux/meshoptimizer
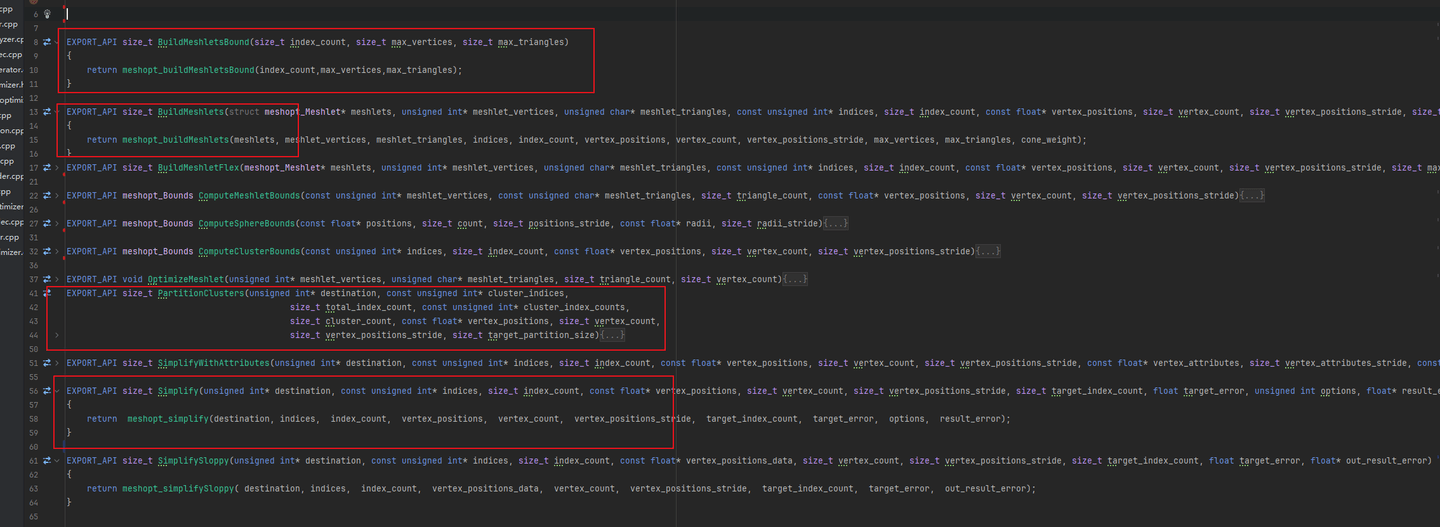
我们新建一个C++导出DLL的工程,封装几个主要函数让Unity可以使用。其实代码量不多,翻译成C#直接用也可以。
分别是:
- meshopt_buildMeshlets(构建Cluster)
- meshopt_partitionClusters(Cluster划分Partition)
- meshopt_buildMeshletsBound(计算Cluster数量)
- meshopt_computeSphereBounds(合并BoundsSphere)
在C#中引用这些函数:

unsafe static List<Cluster> clusterize(Vector3[] vertices, int[] indices)
{
constint max_vertices = 192; // TODO: depends on kClusterSize, also may want to dial down for mesh shaders
constint max_triangles = kClusterSize; //128
constint min_triangles = (kClusterSize / 3) & ~3;
constfloat split_factor = 2.0f;
constfloat fill_weight = 0.75f;
int max_meshlets = BuildMeshletsBound(indices.Length, max_vertices, max_triangles);//meshopt_buildMeshletsBound
var meshlets = new Meshlet[max_meshlets * 2];
var meshlet_vertices = newint[max_meshlets * max_vertices];
var meshlet_triangles = newbyte[max_meshlets * max_triangles * 3];
var meshlet_count = BuildMeshletFlex(meshlets, meshlet_vertices, meshlet_triangles, indices, indices.Length, vertices, vertices.Length, sizeof(float) * 3, max_vertices, min_triangles, max_triangles, 0.0f,
split_factor);//meshopt_buildMeshlets
List<Cluster> clusters = new List<Cluster>(meshlet_count);
for (int i = 0; i < meshlet_count; i++)
{
ref Meshlet meshlet = ref meshlets[i];
fixed (int* ptr = &meshlet_vertices[meshlet.vertex_offset])
{
fixed (byte* ptr2 = &meshlet_triangles[meshlet.triangle_offset])
{
OptimizeMeshlet(ptr, ptr2, (int)meshlet.triangle_count, (int)meshlet.vertex_count);
}
}
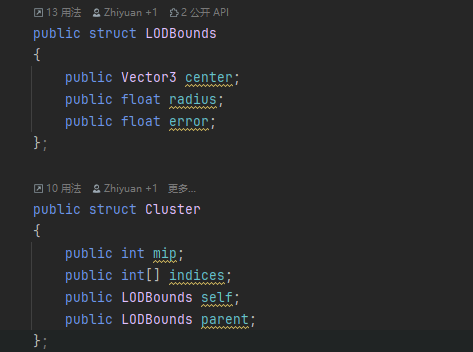
Cluster cluster = new Cluster();
cluster.indices = newint[meshlet.triangle_count * 3];
for (int j = 0; j < meshlet.triangle_count * 3; ++j)
cluster.indices[j] =
meshlet_vertices[meshlet.vertex_offset + meshlet_triangles[meshlet.triangle_offset + j]];
cluster.parent.error = float.MaxValue;
clusters.Add(cluster);
}
return clusters;
}
然后可以直接通过meshopt_buildMeshlets函数,获得每个cluster的indexs。
2. Build DAG
有了这些Cluster,就可以构建“LOD”了,只需要循环这个操作:打组->合并->减面->clusterize。如下图:
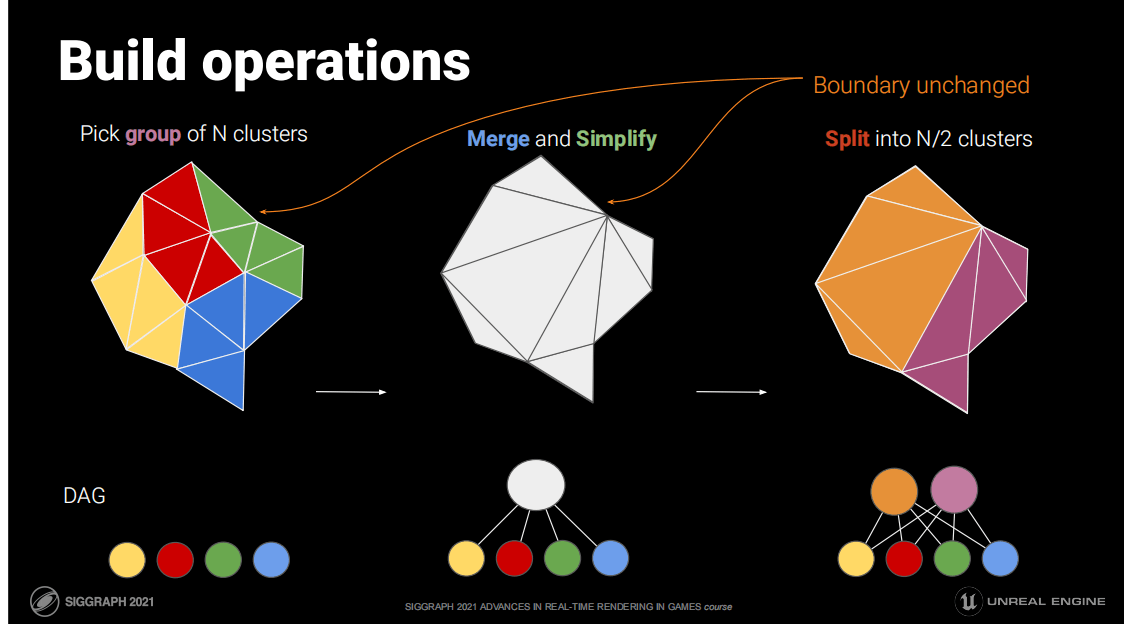
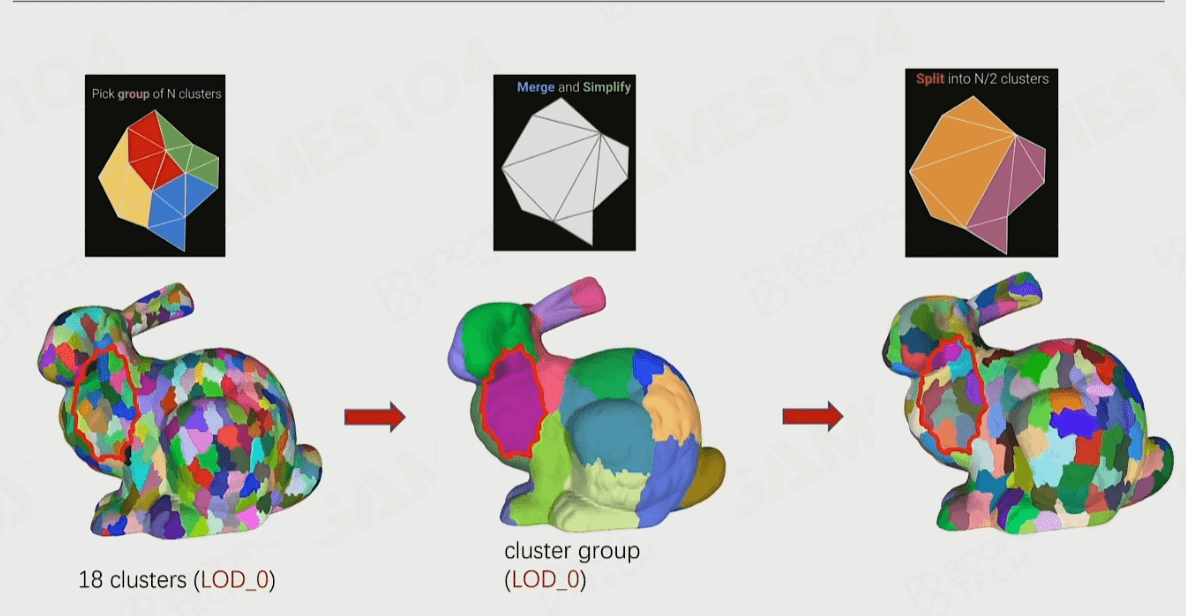
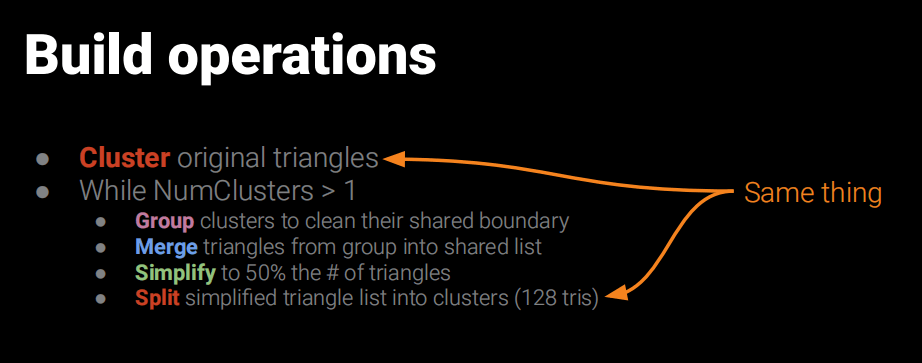
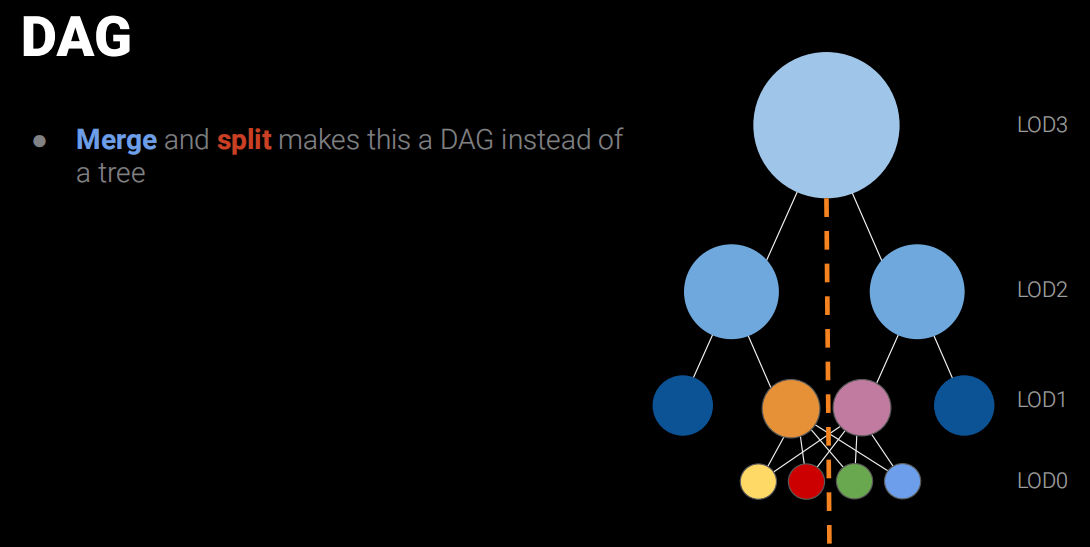
这个过程感觉就像Mipmap一样,一层一层往上合并和简化,并记录一个Err误差值和Bounds用于运行时LOD选择用。而这些合并的的节点就叫做Cluster Group。最后得出一个DAG(有向无环图,Directed Acyclic Graph)的结构。
public struct ClusterGroup
{
public List<int> Children;
public Vector3 Bounds;
publicfloat radius;
public Vector3 LODBounds;
publicfloat MinLODError;
publicfloat MaxParentLODError;
publicint MipLevel;
}
publicclassNaniteSubMesh
{
public List<ClusterGroup> clusterGroupList;
public List<Cluster> clusterList;
publicint maxMipLevel;
}
static NaniteSubMesh Nanite(Vector3[] vertices,Vector3[] normals, int[] indices)
{
NaniteSubMesh res = new NaniteSubMesh();
List<ClusterGroup> clusterGroupList = new List<ClusterGroup>();
var clusters = clusterize(vertices, indices);
res.clusterList = clusters;
res.clusterGroupList = clusterGroupList;
res.maxMipLevel = 0;
for (int i = 0; i < clusters.Count; ++i)
{
var c = clusters[i];
c.self = Bounds(vertices, clusters[i].indices, 0f);
c.mip = 0;
clusters[i] = c;
}
List<int> pending = new List<int>(clusters.Count);
int[] remap = newint[vertices.Length];
for (int i = 0; i < remap.Length; ++i)
remap[i] = i;
for (int i = 0; i < clusters.Count; ++i)
pending.Add(i);
int curMip = 1;
byte[] locks = newbyte[vertices.Length];
while (pending.Count > 1)
{
List<List<int>> groups = partition(clusters, pending, remap, vertices);
if (kUseLocks)
lockBoundary(locks, groups, clusters, remap);
pending.Clear();
List<int> retry = new List<int>();
int triangles = 0;
int stuck_triangles = 0;
for (int i = 0; i < groups.Count; ++i)
{
var curGroupClusters = groups[i];
if (curGroupClusters.Count == 0)
{
continue; // metis shortcut
}
List<int> merged = new List<int>(vertices.Length);
for (int j = 0; j < curGroupClusters.Count; ++j)
{
merged.AddRange(clusters[curGroupClusters[j]].indices);
}
LODBounds groupb = boundsMerge(clusters, curGroupClusters);
ClusterGroup clusterGroup = new ClusterGroup();
clusterGroup.Bounds = groupb.center;
clusterGroup.MaxParentLODError = groupb.error;
clusterGroup.radius = groupb.radius;
clusterGroup.Children = new List<int>(merged.Count);
clusterGroup.MipLevel = curMip - 1;
for (int j = 0; j < curGroupClusters.Count; ++j)
{
clusterGroup.Children.Add(curGroupClusters[j]);
}
clusterGroupList.Add(clusterGroup);
// aim to reduce group size in half
int target_size = (merged.Count / 3) / 2 * 3;
float error = 0f;
var simplified = simplify(vertices, normals, merged.ToArray(), kUseLocks ? locks : null, target_size,
ref error);
if (simplified.Count > merged.Count * kSimplifyThreshold)
{
stuck_triangles += merged.Count / 3;
for (int j = 0; j < curGroupClusters.Count; ++j)
{
retry.Add(curGroupClusters[j]);
}
continue; // simplification is stuck; abandon the merge
}
// enforce bounds and error monotonicity
// note: it is incorrect to use the precise bounds of the merged or simplified mesh, because this may violate monotonicity
var split = clusterize(vertices, simplified.ToArray());
groupb.error += error; // this may overestimate the error, but we are starting from the simplified mesh so this is a little more correct
// update parent bounds and error for all clusters in the group
// note that all clusters in the group need to switch simultaneously so they have the same bounds
for (int j = 0; j < curGroupClusters.Count; ++j)
{
int clusterIndex = curGroupClusters[j];
var t = clusters[clusterIndex];
t.parent = groupb;
clusters[clusterIndex] = t;
}
for (int j = 0; j < split.Count; ++j)
{
var sj = split[j];
sj.self = groupb;
sj.mip = curMip;
split[j] = sj;
clusters.Add(sj); // std::move
pending.Add(clusters.Count - 1);
triangles += sj.indices.Length / 3;
}
}
curMip++;
}
if (pending.Count == 1)
{
var c = clusters[pending[0]];
ClusterGroup clusterGroup = new ClusterGroup();
clusterGroup.Bounds = c.self.center;
clusterGroup.MaxParentLODError = c.self.error;
clusterGroup.radius = c.self.radius;
clusterGroup.Children = new List<int>(1);
clusterGroup.MipLevel = curMip - 1;
clusterGroup.Children.Add(pending[0]);
clusterGroupList.Add(clusterGroup);
}
res.maxMipLevel = curMip - 1;
return res;
}
static void lockBoundary(byte[] locks, List<List<int>> groups, List<Cluster> clusters, int[] remap)
{
// for each remapped vertex, keep track of index of the group it's in (or -2 if it's in multiple groups)
int[] groupmap = newint[locks.Length];
for (int i = 0; i < groupmap.Length; ++i)
groupmap[i] = -1;
for (int i = 0; i < groups.Count; ++i)
{
var c = groups[i];
for (int j = 0; j < c.Count; ++j)
{
var indices = clusters[c[j]].indices;
for (int k = 0; k < indices.Length; ++k)
{
var v = indices[k];
var r = remap[v];
if (groupmap[r] == -1 || groupmap[r] == i)
groupmap[r] = i;
else
groupmap[r] = -2;
}
}
}
// note: we need to consistently lock all vertices with the same position to avoid holes
for (int i = 0; i < locks.Length; ++i)
{
var r = remap[i];
locks[i] = (byte)((groupmap[r] == -2) ? 1 : 0);
}
}
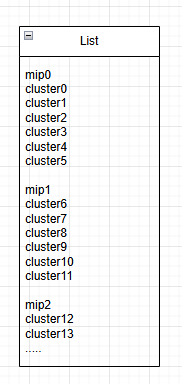
这样我们得到各级Mip的一系列Clusters。
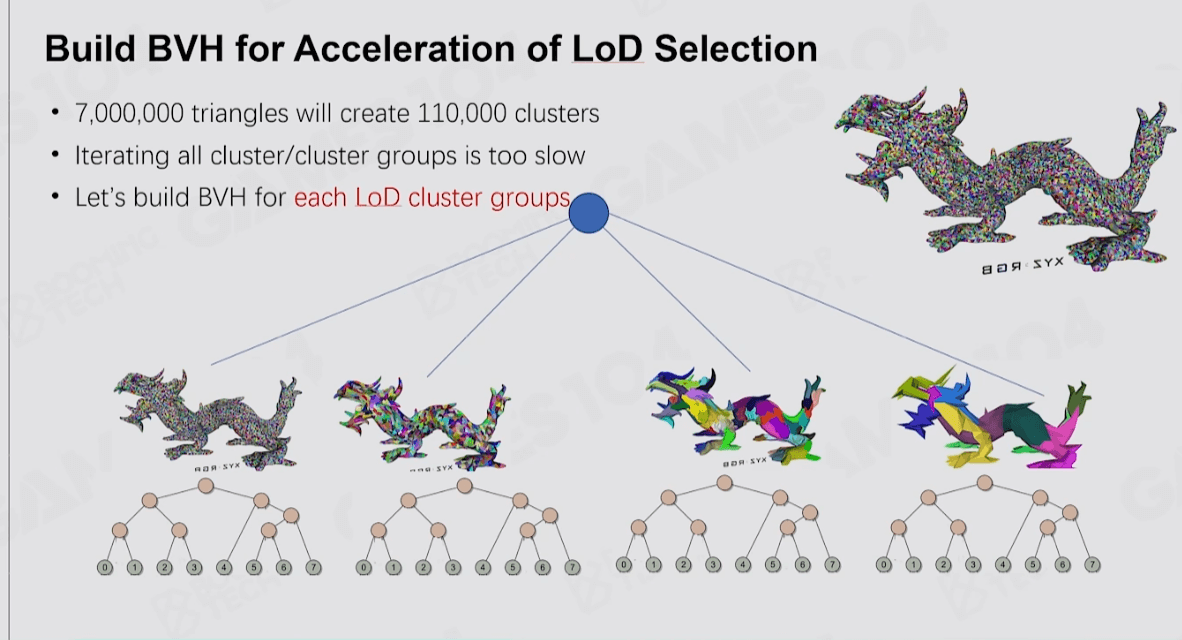
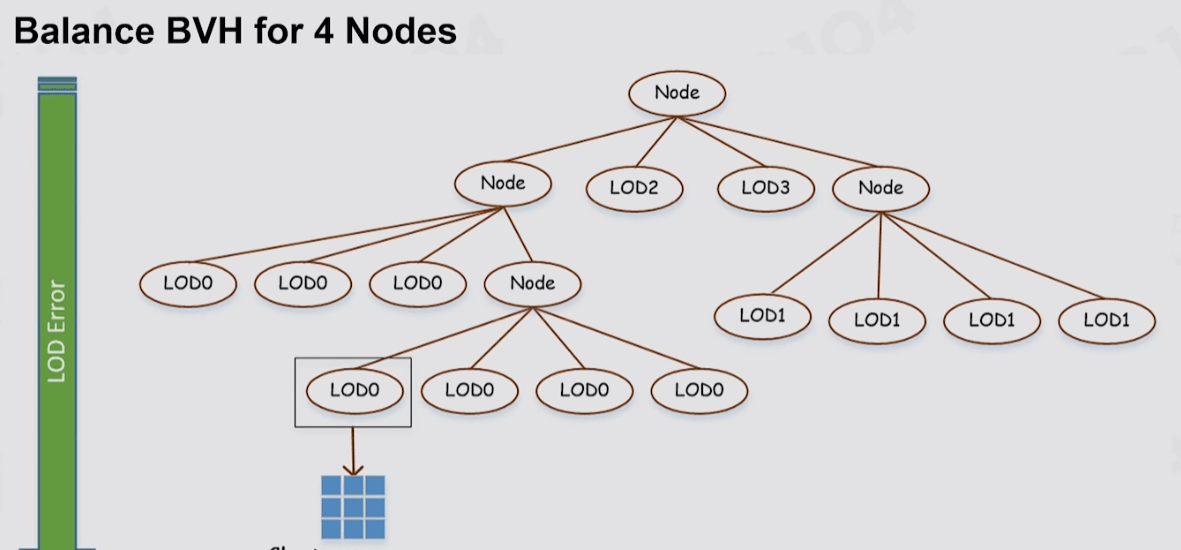
3. 加速结构
即使把三角形划分成Clusters数量也太多,使用Compute Shader来做并行结算效率也不高,于是Nanite就使用了BVH来作为ClusterGroup的加速结构,然后配合Persistent Threads做查找过滤。
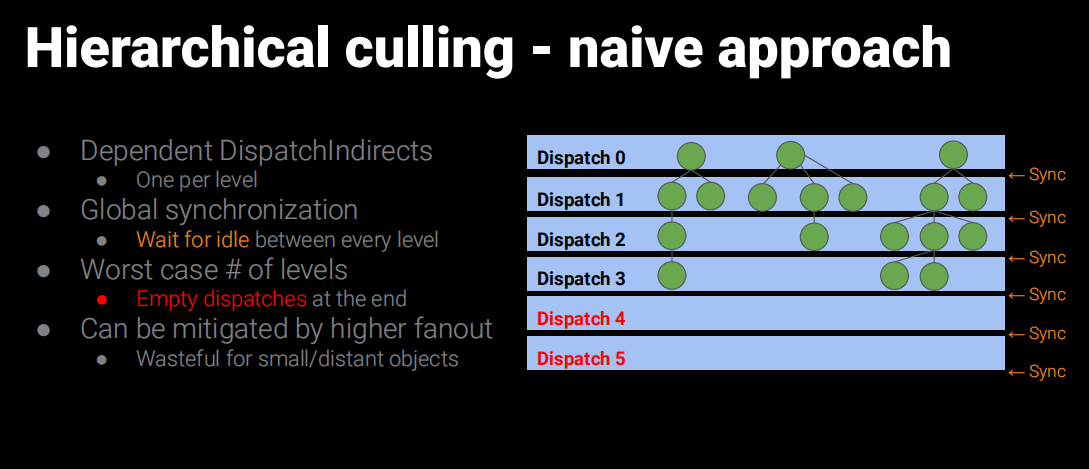
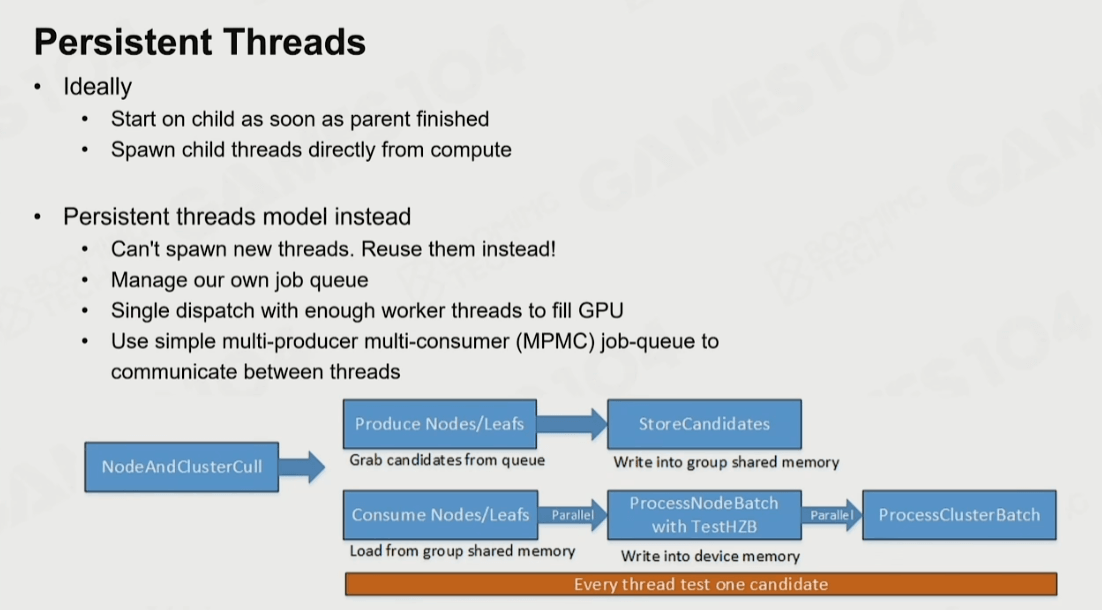
Persistent Threads遍历BVH部分,有兴趣可以参考UE5源码:
Shaders\Private\Nanite\NaniteClusterCulling.usf
UE5中也有不使用Persistent Threads的流程,应该说一般默认就是不使用的。
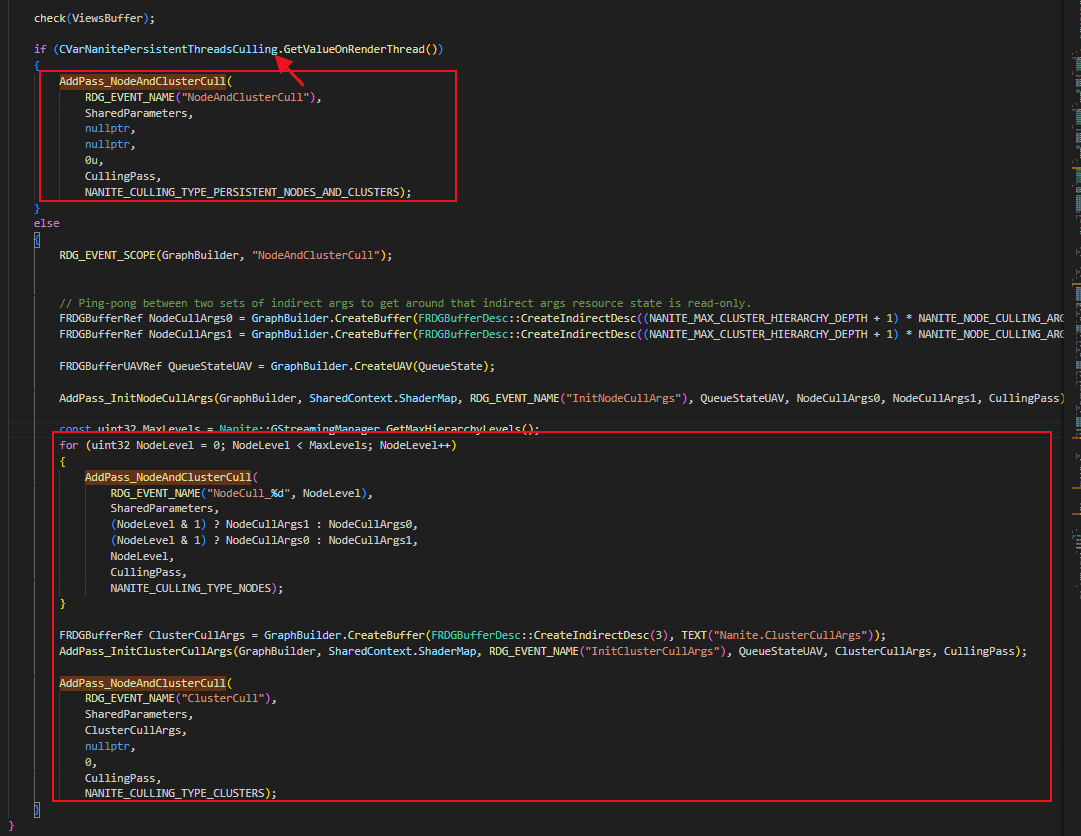
UE5源码部分
个人认为Persistent Threads方案在GPU遍历这种BVH结构有点暴力和重度,所以简化了一下,把多个Cluster合并成一个剔除单元(Part),先并行对Part做剔除,再对Part里的Cluster去做并行剔除,两层结构来加速作为Persistent Threads的一个简单替代方案。
然后把多个Part组织成Page用于分块加载。材质处理细节也不同,UE5的材质是每个Cluster会记录MaterialRange,简单起见这里实现是每个SubMesh会去构建独立的Clusters。
代码如下:
[Serializable]
publicstruct NaniteCluster
{
publicint indiceIndex;
publicint indiceCount;
publicfloat selfErrer;
publicfloat parentErrer;
public Vector4 selfSphere;
public Vector4 parentSphere;
publicint subMeshID;
publicint vertexOffset;
};
[Serializable]
publicstruct NaniteClusterGroup
{
publicint ClusterStart;
publicint ClusterCount;
public Vector3 Bounds;
publicfloat radius;
public Vector3 LODBounds;
publicfloat MinLODError;
publicfloat MaxParentLODError;
publicint MipLevel;
}
[Serializable]
publicstruct NaniteMeshPart
{
publicint ClusterStart;
publicint ClusterCount;
public Vector4 selfSphere;
publicfloat MaxParentLODError;
}
public classNaniteSubMesh
{
public List<ClusterGroup> clusterGroupList;
public List<Cluster> clusterList;
publicint maxMipLevel;
}
publicclassBuildPart
{
public List<int> clusterList;
publicint mip;
publicint subMesh;
}
public static void BuildNaniteMesh(Mesh mesh)
{
var vertices = mesh.vertices;
var normals = mesh.normals;
var uvs = mesh.uv;
int subMeshCount = mesh.subMeshCount;
int totalClusterCount = 0;
int totalIndexCount = 0;
List<NaniteSubMesh> subMeshList = new List<NaniteSubMesh>();
for (int i = 0; i < subMeshCount; i++)
{
var triangles = mesh.GetTriangles(i);
var subMesh = Nanite(vertices,normals,triangles);
subMeshList.Add(subMesh);
totalClusterCount += subMesh.clusterList.Count;
}
List<BuildPart> buildPartsList = new List<BuildPart>(totalClusterCount);
int MAX_PART_PERPAGE = 128;
int MAX_CLUSTER_PERPART = 8;
for (int subMeshIndex = 0; subMeshIndex < subMeshList.Count; subMeshIndex++)
{
var subMesh = subMeshList[subMeshIndex];
List<Cluster> clusters = subMesh.clusterList;
var groupsList = subMesh.clusterGroupList;
BuildPart buildPart = null;
for (int i = 0; i < groupsList.Count; i++)
{
var gIndex = i; // sortGroups[i].OldIndex;
var g = groupsList[gIndex];
var childs = g.Children;
for (int c = 0; c < childs.Count; c++)
{
int cIndex = childs[c];
int cMip = clusters[cIndex].mip;
totalIndexCount += clusters[cIndex].indices.Length;
//new Part
if (buildPart == null || buildPart.clusterList.Count >= MAX_CLUSTER_PERPART ||
buildPart.mip != cMip)
{
buildPart = new BuildPart();
buildPart.clusterList = new List<int>(MAX_CLUSTER_PERPART);
buildPart.mip = cMip;
buildPart.subMesh = subMeshIndex;
buildPartsList.Add(buildPart);
}
buildPart.clusterList.Add(cIndex);
}
}
}
int buildPartCount = buildPartsList.Count;
NaniteMeshPage[] pageArray = new NaniteMeshPage[(buildPartCount+(MAX_PART_PERPAGE-1))/MAX_PART_PERPAGE];//ceil
List<int> tempIndiceList = new List<int>(totalIndexCount);
List<int> mipLists = new List<int>(totalClusterCount);
int partIndex = 0;
for (int i = 0; i < pageArray.Length; i++)
{
//create new page
var p = ScriptableObject.CreateInstance<NaniteMeshPage>();
pageArray[i] = p;
tempIndiceList.Clear();
int partCount = (i == (pageArray.Length -1)) ? (buildPartCount % MAX_PART_PERPAGE) : MAX_PART_PERPAGE;
p.parts = new NaniteScene.NaniteMeshPart[partCount];
List<NaniteScene.NaniteCluster> pageClusters = new List<NaniteScene.NaniteCluster>(partCount * MAX_CLUSTER_PERPART);
for (int j = 0; j < partCount; j++)
{
var buildPart = buildPartsList[partIndex];
var buildPartCluster = buildPart.clusterList;
//create part
var part = new NaniteScene.NaniteMeshPart();
part.ClusterStart = pageClusters.Count; //local index
part.ClusterCount = buildPartCluster.Count;
int subMeshID = buildPart.subMesh;
float maxParentErr = 0f;
var clusters = subMeshList[subMeshID].clusterList;
for (int c = 0; c < buildPartCluster.Count; c++)
{
var cluster = clusters[buildPartCluster[c]];
mipLists.Add(cluster.mip);
//create Cluster
NaniteScene.NaniteCluster naniteCluster = new NaniteScene.NaniteCluster();
naniteCluster.indiceIndex = tempIndiceList.Count;
naniteCluster.indiceCount = cluster.indices.Length;
naniteCluster.parentErrer = cluster.parent.error;
naniteCluster.parentSphere = new Vector4(cluster.parent.center.x,cluster.parent.center.y,cluster.parent.center.z, cluster.parent.radius);
naniteCluster.selfErrer = cluster.self.error;
naniteCluster.selfSphere = new Vector4(cluster.self.center.x,cluster.self.center.y,cluster.self.center.z, cluster.self.radius);
naniteCluster.subMeshID = subMeshID;
tempIndiceList.AddRange(cluster.indices);
maxParentErr = Mathf.Max(naniteCluster.parentErrer, maxParentErr);
pageClusters.Add(naniteCluster);
}
LODBounds partBounds = boundsMerge(clusters, buildPartCluster,true);
part.selfSphere = new Vector4(partBounds.center.x,partBounds.center.y,partBounds.center.z,partBounds.radius);
part.MaxParentLODError = maxParentErr;
p.parts[j] = part;
partIndex++;
}
p.clusterArray = pageClusters.ToArray();
p.indiceArray = tempIndiceList.ToArray();
p.clusterMip = mipLists.ToArray();
}
string fileName = AssetDatabase.GetAssetPath(mesh);
string extension = Path.GetExtension(fileName);
fileName = fileName.Replace(extension, "");
//Build page
int totalVerts = 0;
for (int i = 0; i < pageArray.Length; i++)
{
var page = pageArray[i];
var clusterArray = page.clusterArray;
var indiceArray = page.indiceArray;
Dictionary<int,int> indicesMap = new Dictionary<int,int>();
List<Vector3> tempVerts = new List<Vector3>(vertices.Length);
List<Vector3> tempNormals = new List<Vector3>(vertices.Length);
List<Vector2> tempUVs = new List<Vector2>(vertices.Length);
List<int> newIndices = new List<int>(totalIndexCount);
for (int c = 0; c < clusterArray.Length; c++)
{
refvar cluster = ref clusterArray[c];
var indexStart = cluster.indiceIndex;
var indexEnd = indexStart+cluster.indiceCount;
for (int index = indexStart; index < indexEnd; index++)
{
int vertIndex = indiceArray[index];
int newIndex;
if (!indicesMap.TryGetValue(vertIndex,out newIndex))
{
newIndex = newIndices.Count;
indicesMap.Add(vertIndex, newIndex);
tempVerts.Add(vertices[vertIndex]);
tempNormals.Add(normals[vertIndex]);
if (uvs.Length == 0)
{
tempUVs.Add(Vector2.zero);
}
else
{
tempUVs.Add(uvs[vertIndex]);
}
newIndices.Add(newIndex);
}
indiceArray[index] = newIndex;
}
}
page.vertexStride = 5;//pos3 + uv2
page.vertexData = newfloat[tempVerts.Count * page.vertexStride];
page.vertexCount = tempVerts.Count;
for (int v = 0; v < tempVerts.Count; v++)
{
int vertexIndex = v * page.vertexStride;
page.vertexData[vertexIndex + 0] = tempVerts[v].x;
page.vertexData[vertexIndex + 1] = tempVerts[v].y;
page.vertexData[vertexIndex + 2] = tempVerts[v].z;
page.vertexData[vertexIndex + 3] = tempUVs[v].x;
page.vertexData[vertexIndex + 4] = tempUVs[v].y;
}
totalVerts +=tempVerts.Count;
string newPath = fileName + "_p"+i +".asset";
AssetDatabase.CreateAsset(page, newPath);
}
AssetDatabase.Refresh();
Debug.Log("mesh Vertx:"+vertices.Length +" mesh Nanite:"+ totalVerts + " cluster:"+totalClusterCount + "part:"+ buildPartCount +" page:"+pageArray.Length);
NaniteMesh naniteMesh = ScriptableObject.CreateInstance<NaniteMesh>();
{
naniteMesh.subMeshCount = subMeshCount;
naniteMesh.pageArray = new NaniteMeshPage[pageArray.Length];
for (int i = 0; i < pageArray.Length; i++)
{
string newPath = fileName + "_p" + i + ".asset";
naniteMesh.pageArray[i] = AssetDatabase.LoadAssetAtPath<NaniteMeshPage>(newPath);
}
}
var meshBound = mesh.bounds;
naniteMesh.boundingSphere = meshBound.center;
naniteMesh.boundingSphere.w = meshBound.extents.magnitude;
string meshExt = "_mesh.asset";
AssetDatabase.CreateAsset(naniteMesh, fileName + meshExt);
AssetDatabase.Refresh();
}
到这里离线部分基本结束,可以得到一个Nanite的资源。当然UE5原文还做了很多操作,如BVH、Encode、编码、压缩、Page的划分、顶点属性优化等,个人认为这些都属于工程细节。
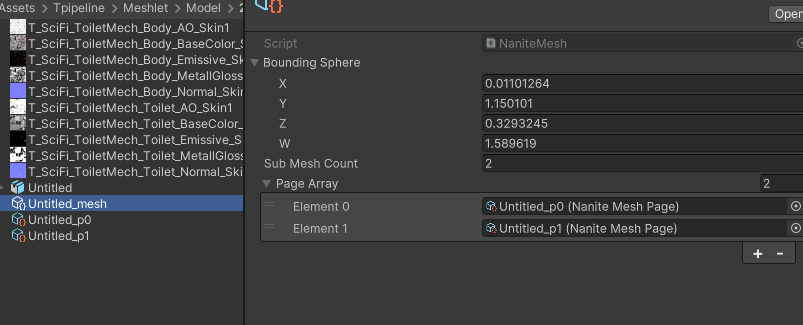
4. 运行时资源
来到Runtime部分,我们需要把这个Nanite Mesh加载上来,方便起见,这里直接引用一下资源在脚本上,偷懒省略加载部分。
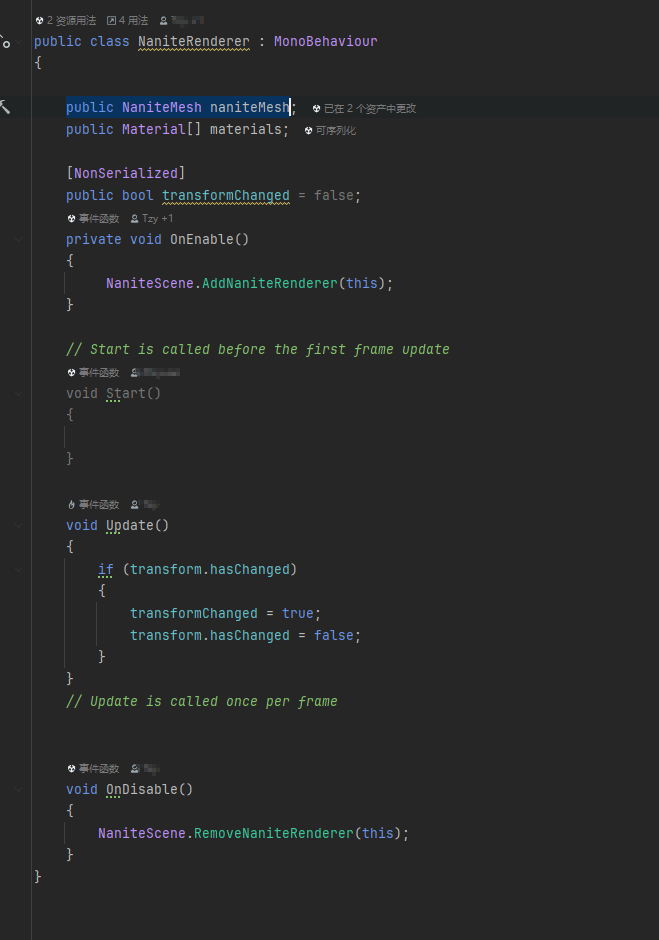
把资源、Object、材质信息整合起来,传到GPU的Buffer中。这里做法很不正式还是偷懒来处理。当然也可以用Compute Shader来更新Page数据到GPUBuffer中。
public static List<NaniteRenderer> renderers = new List<NaniteRenderer>();
privatestatic SceneObject[] gpuObjects = new SceneObject[2048];
//cluster -> part -> page
publicstruct SceneObject
{
publicint naniteMeshID;
public Matrix4x4 localToWorldMatrix;
publicint materialIDOffset;
}
publicstruct NaniteRes
{
public Vector4 boundingSphere;
publicint partIndex;
publicint partCount;
}
unsafe static void UpdateRenderList()
{
if(renderers.Count == 0)
return;
//object update
if (renderers.Count > gpuObjects.Length)
{
gpuObjects = new SceneObject[Mathf.NextPowerOfTwo(renderers.Count)];
}
objectCount = 0;
maxPartCount = 0;
naniteMeshes.Clear();
materialList.Clear();
List<int> materialIndices = new List<int>();
for (int i = 0; i < renderers.Count; i++)
{
var renderer = renderers[i];
var nMesh = renderer.naniteMesh;
foreach (var p in nMesh.pageArray)
{
maxPartCount += p.parts.Length;
maxClusterCount += p.clusterArray.Length;
}
SceneObject obj = new SceneObject();
obj.localToWorldMatrix = renderer.transform.localToWorldMatrix;
//mesh index
int index = naniteMeshes.IndexOf(nMesh);
if (index < 0)
{
index = naniteMeshes.Count;
naniteMeshes.Add(nMesh);
}
obj.naniteMeshID = index;
//mat indexs
obj.materialIDOffset = materialIndices.Count;
for (int m = 0; m < renderer.materials.Length; m++)
{
var mat = renderer.materials[m];
int matIndex = materialList.IndexOf(mat);
if (matIndex < 0)
{
matIndex = materialList.Count;
materialList.Add(mat);
}
materialIndices.Add(matIndex);
}
gpuObjects[i] = obj;
renderer.transformChanged = false;
objectCount++;
}
if(candidateClusterBuffer!=null)
candidateClusterBuffer.Dispose();
candidateClusterBuffer = new GraphicsBuffer(GraphicsBuffer.Target.Structured, maxClusterCount *2, sizeof(int));
if(visibleClusterBuffer != null)
visibleClusterBuffer.Dispose();
visibleClusterBuffer = new GraphicsBuffer(GraphicsBuffer.Target.Structured,maxClusterCount *2, sizeof(int));
if (objectsBuffer != null)
objectsBuffer.Dispose();
objectsBuffer = new GraphicsBuffer(GraphicsBuffer.Target.Structured, objectCount, sizeof(SceneObject));
objectsBuffer.SetData(gpuObjects,0,0,objectCount);
if(visObjectsBuffer !=null)
visObjectsBuffer.Dispose();
visObjectsBuffer = new GraphicsBuffer(GraphicsBuffer.Target.Structured,objectCount, sizeof(int));
int vertCount = 0;
List<NaniteCluster> tempClusters = new List<NaniteCluster>(2048);
List<NaniteMeshPart> tempParts = new List<NaniteMeshPart>(2048);
List<NaniteRes> naniteRes = new List<NaniteRes>(2048);
List<int> tempIndices = new List<int>(2048 * 100);
List<float> vertexDataList = new List<float>();
//load page
for (int nID = 0; nID < naniteMeshes.Count; nID++)
{
NaniteRes res = new NaniteRes();
var nMesh = naniteMeshes[nID];
//填充到GPU
var pages = nMesh.pageArray;
res.partIndex = tempParts.Count;
res.partCount = 0;
res.boundingSphere = nMesh.boundingSphere;
for (int p = 0; p < pages.Length; p++)
{
var page = pages[p];
var parts = page.parts;
int vertOffset = vertCount;
int indicesOffset = tempIndices.Count;
int clusterOffset = tempClusters.Count;
//add all cluster
var clusters = page.clusterArray;
for (int c = 0; c < clusters.Length; c++)
{
var cluster = clusters[c];
cluster.indiceIndex += indicesOffset;
cluster.vertexOffset = vertOffset;
tempClusters.Add(cluster);
}
//add all part
for (int partIndex = 0; partIndex < parts.Length; partIndex++)
{
var part = parts[partIndex];
part.ClusterStart += clusterOffset;
tempParts.Add(part);
res.partCount++;
}
//add page data
tempIndices.AddRange( page.indiceArray);
vertexDataList.AddRange(page.vertexData);
vertCount += page.vertexCount;
}
naniteRes.Add(res);
}
//TODO GPU Update Buffer
if (naniteResBuffer != null)
naniteResBuffer.Dispose();
naniteResBuffer = new GraphicsBuffer(GraphicsBuffer.Target.Structured, naniteRes.Count, sizeof(NaniteRes));
naniteResBuffer.SetData(naniteRes);
if (partsBuffer != null)
partsBuffer.Dispose();
partsBuffer = new GraphicsBuffer(GraphicsBuffer.Target.Structured,tempParts.Count, sizeof(NaniteMeshPart));
partsBuffer.SetData(tempParts);
if (clusterBuffer != null)
clusterBuffer.Dispose();
clusterBuffer = new GraphicsBuffer(GraphicsBuffer.Target.Structured, tempClusters.Count, sizeof(NaniteCluster));
clusterBuffer.SetData(tempClusters);
if (indiceseBuffer != null)
indiceseBuffer.Dispose();
indiceseBuffer = new GraphicsBuffer(GraphicsBuffer.Target.Raw, tempIndices.Count, sizeof(int));
indiceseBuffer.SetData(tempIndices);
if(materialIndexBuffer!=null)
materialIndexBuffer.Dispose();
materialIndexBuffer = new GraphicsBuffer(GraphicsBuffer.Target.Structured,materialIndices.Count, sizeof(int));
materialIndexBuffer.SetData(materialIndices);
if(vertexDataBuffer!=null)
vertexDataBuffer.Dispose();
vertexDataBuffer = new GraphicsBuffer(GraphicsBuffer.Target.Raw, vertexDataList.Count,sizeof(float));
vertexDataBuffer.SetData(vertexDataList);
}
//input object ID =>
public unsafe static void UpdateNaniteScene()
{
if (renderListDirty)
{
UpdateRenderList();
// UpdateRenderListGPU();
renderListDirty = false;
}
for (int i = 0; i < renderers.Count; i++)
{
var renderer = renderers[i];
if (renderer.transformChanged)
{
gpuObjects[i].localToWorldMatrix = renderer.transform.localToWorldMatrix;
renderer.transformChanged = false;
transformDirty = true;
}
}
if (objectsBuffer != null && transformDirty)
objectsBuffer.SetData(gpuObjects, 0, 0, objectCount);
}
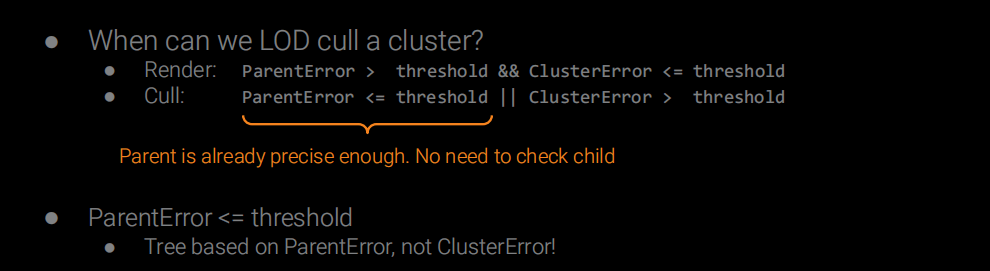
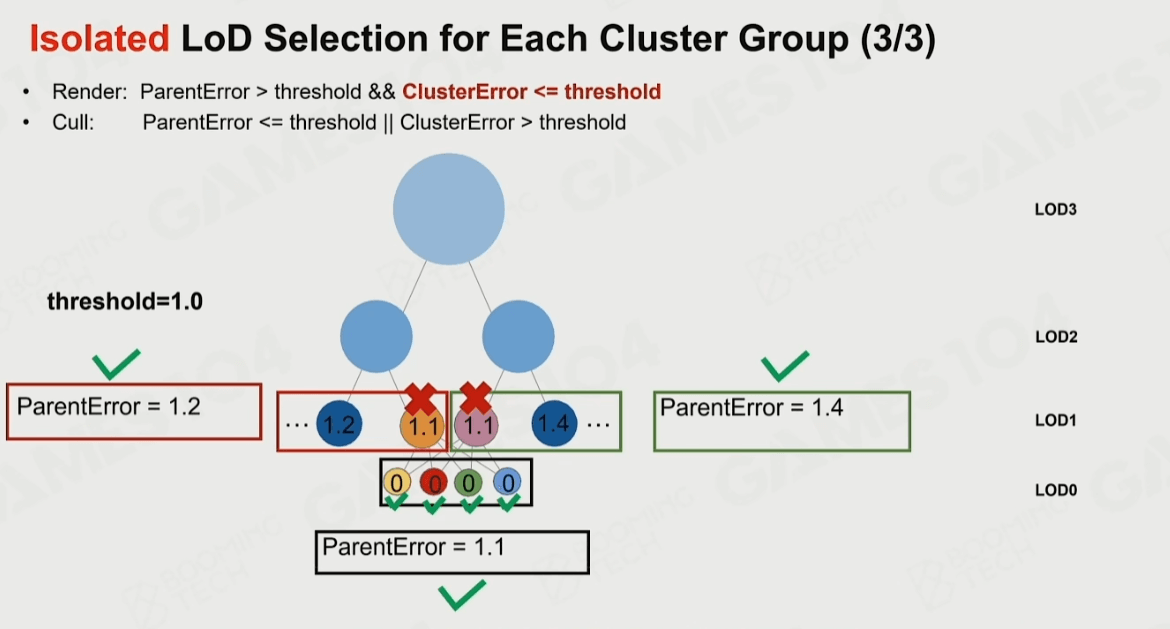
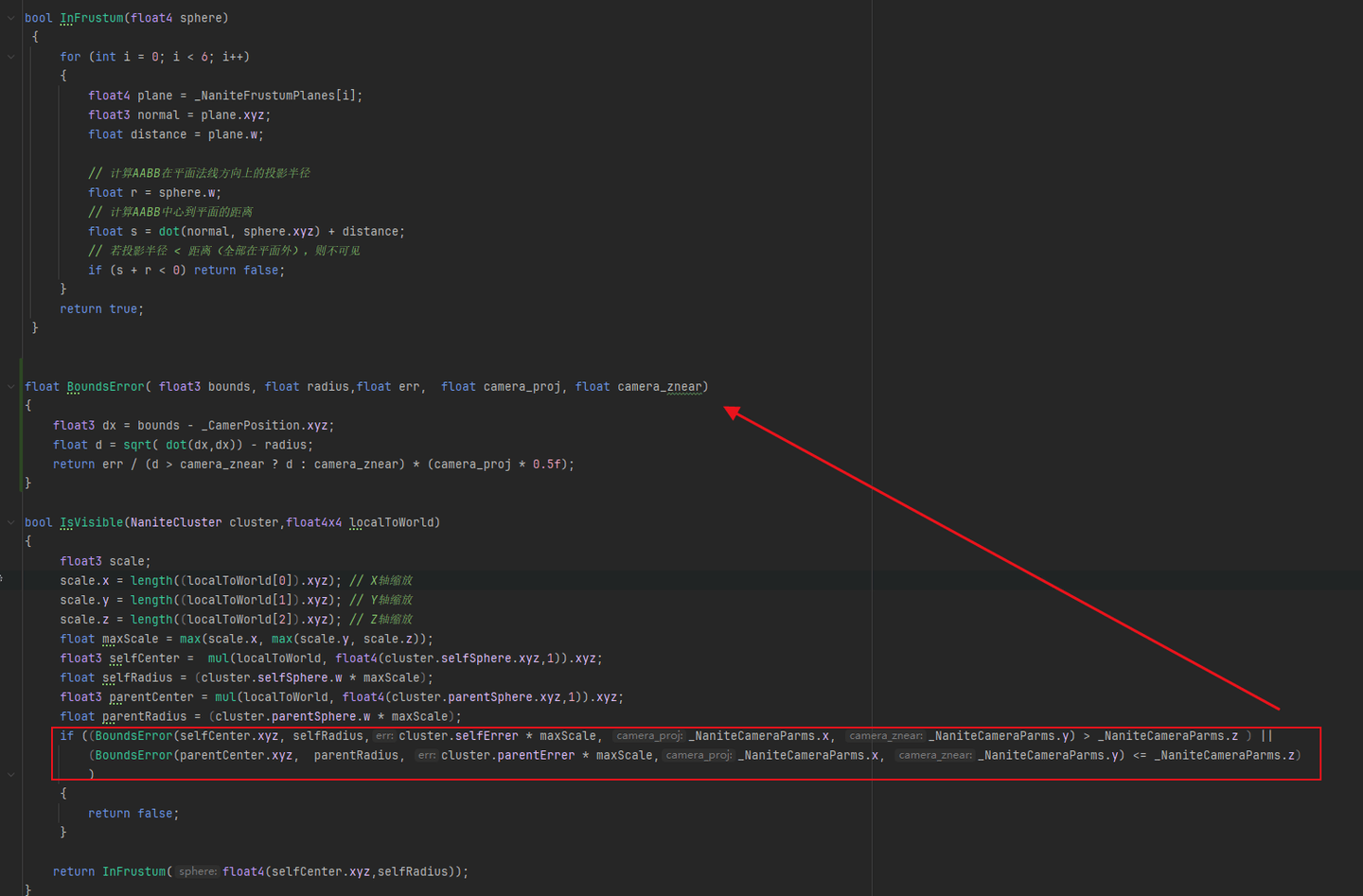
5. 剔除
这时离线时候已经把Clusters扁平化到数组中了,这些Clusters是可以并行进行剔除的,巧妙之处是他记录了父级的误差和自己的误差,当我们传入误差系数时候就可以独立地判断自己是否被剔除,而和上下级无关。
先从CPU发起剔除Compute Shader的Dispatch。这里因为组织数据时候就知道了所有Object最大的Parts/Cluster数量,所以直接用这个数去Dispatch了。
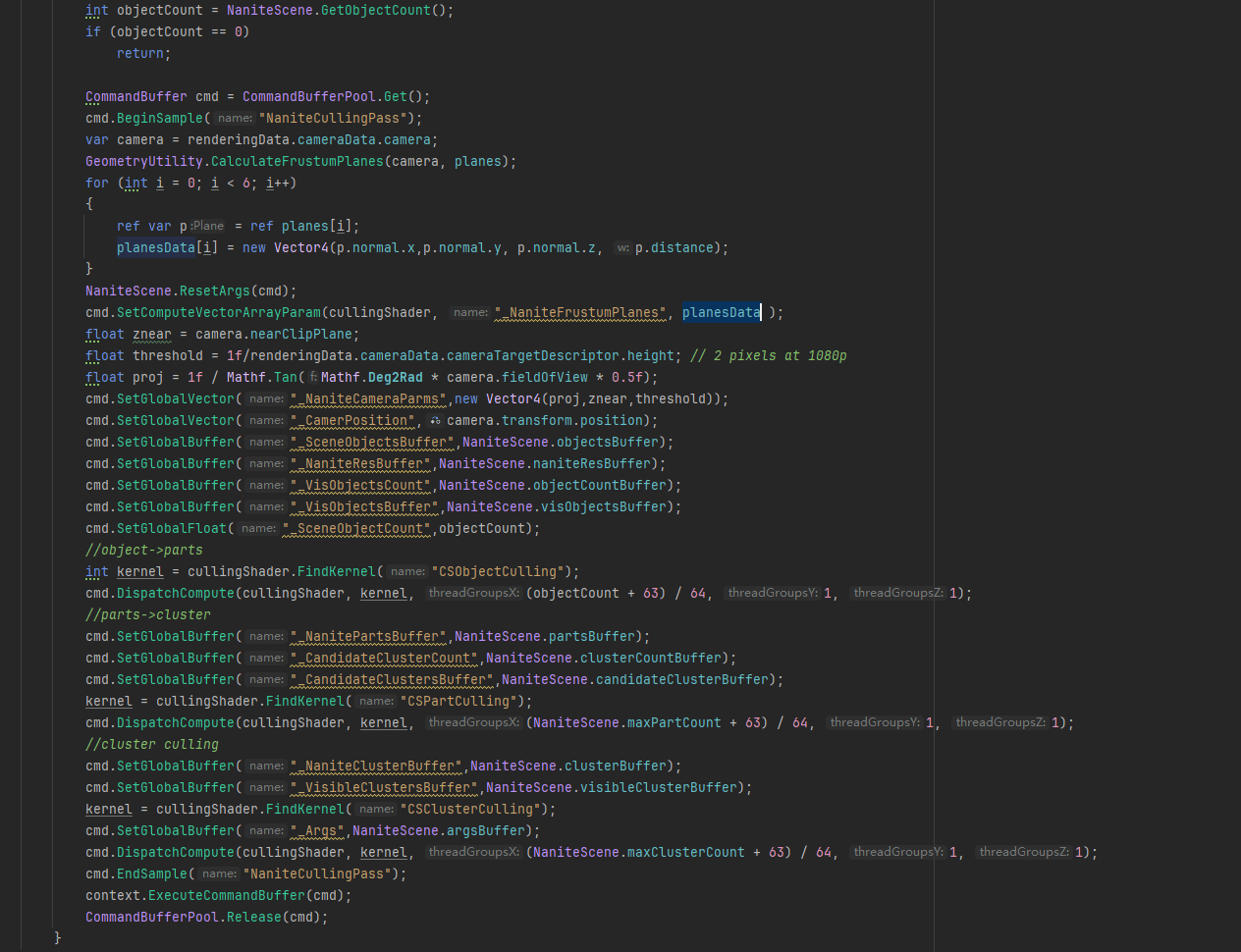
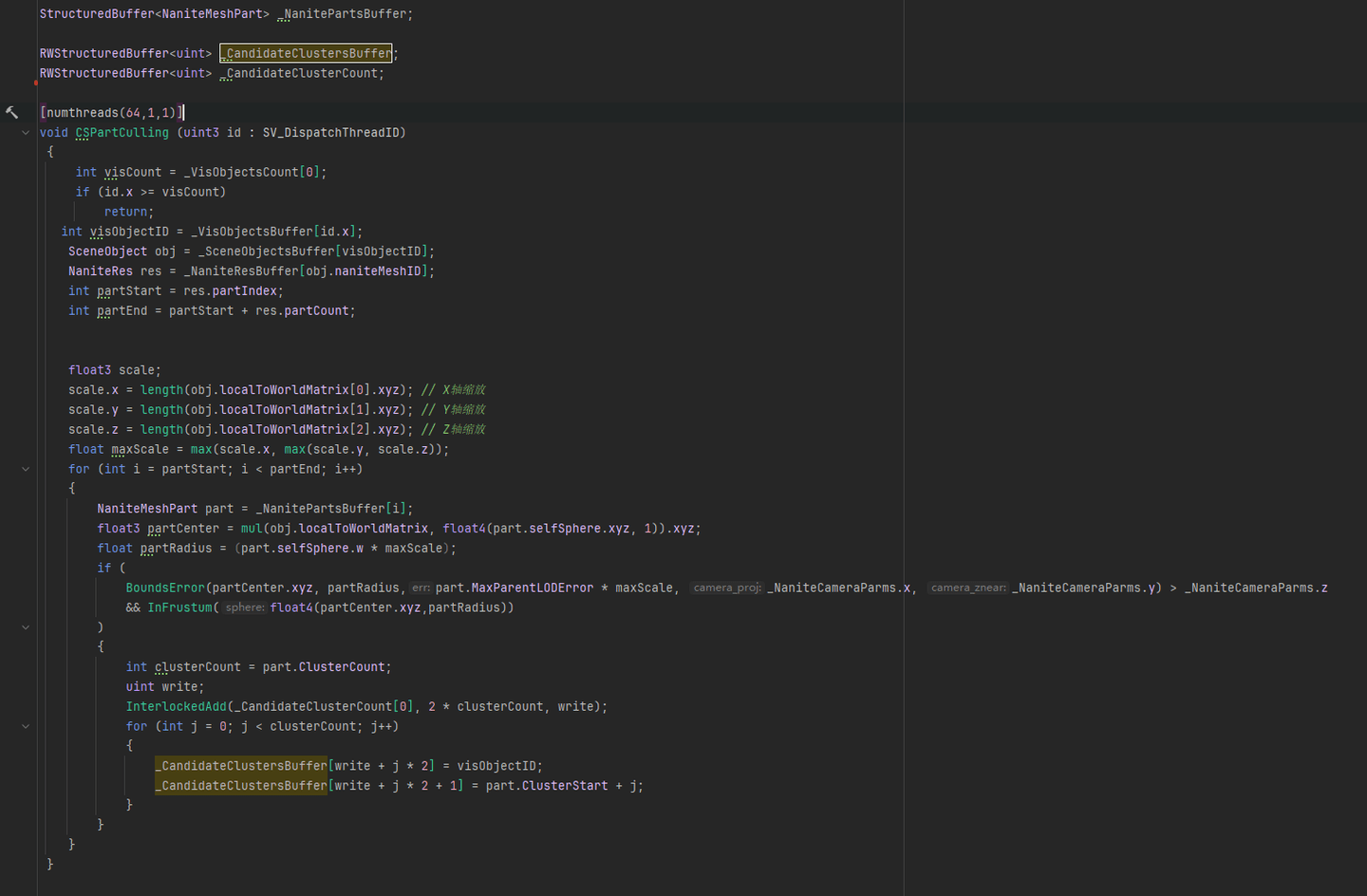
Objects剔除:
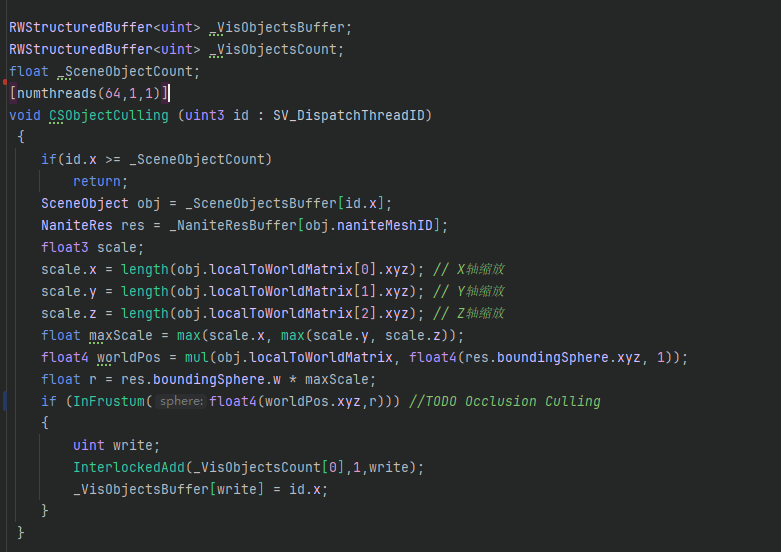
根据Object找到NaniteMesh的Parts进行Culling:
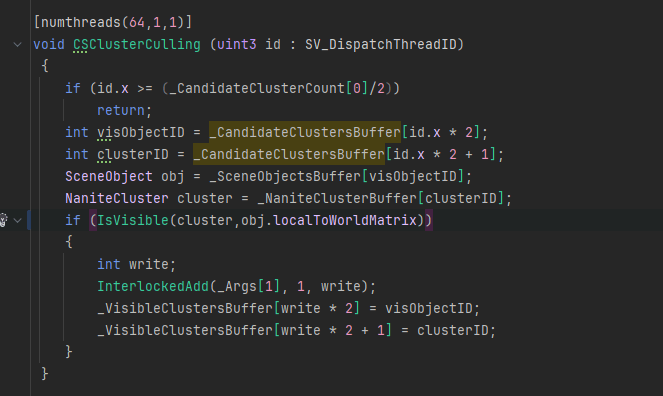
ClustersCulling:
6. 软光栅
略。
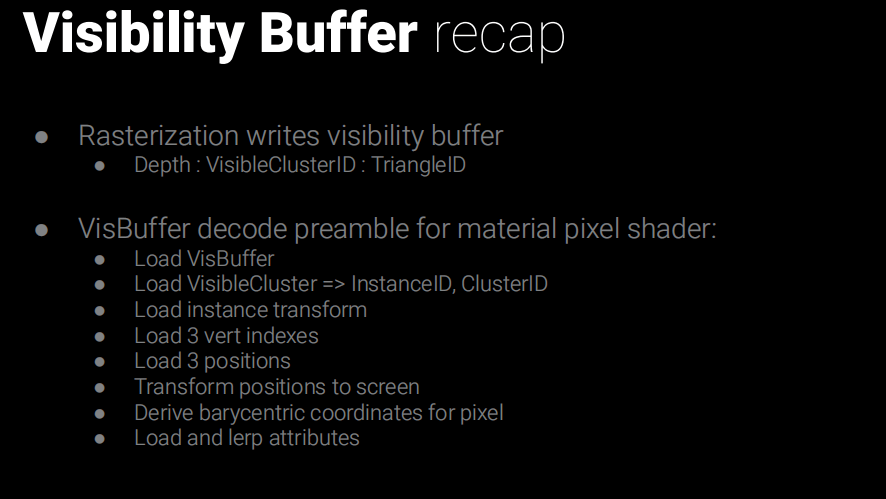
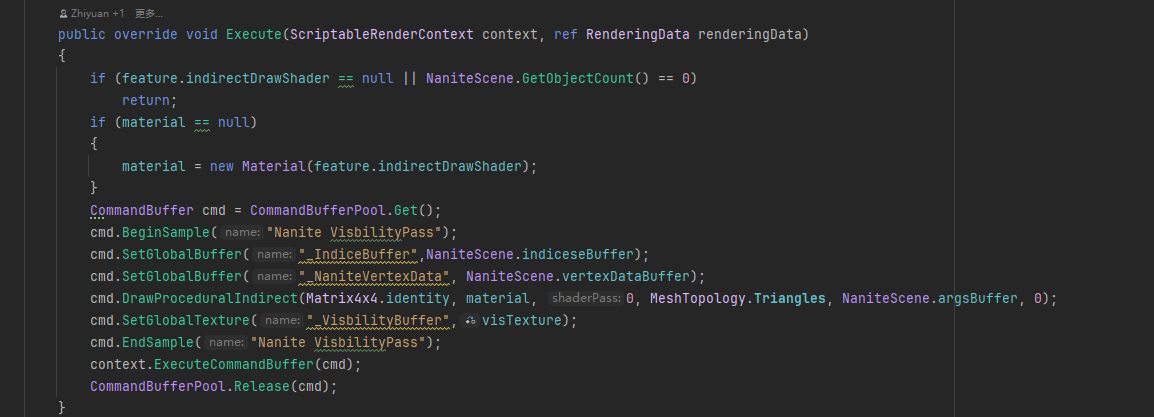
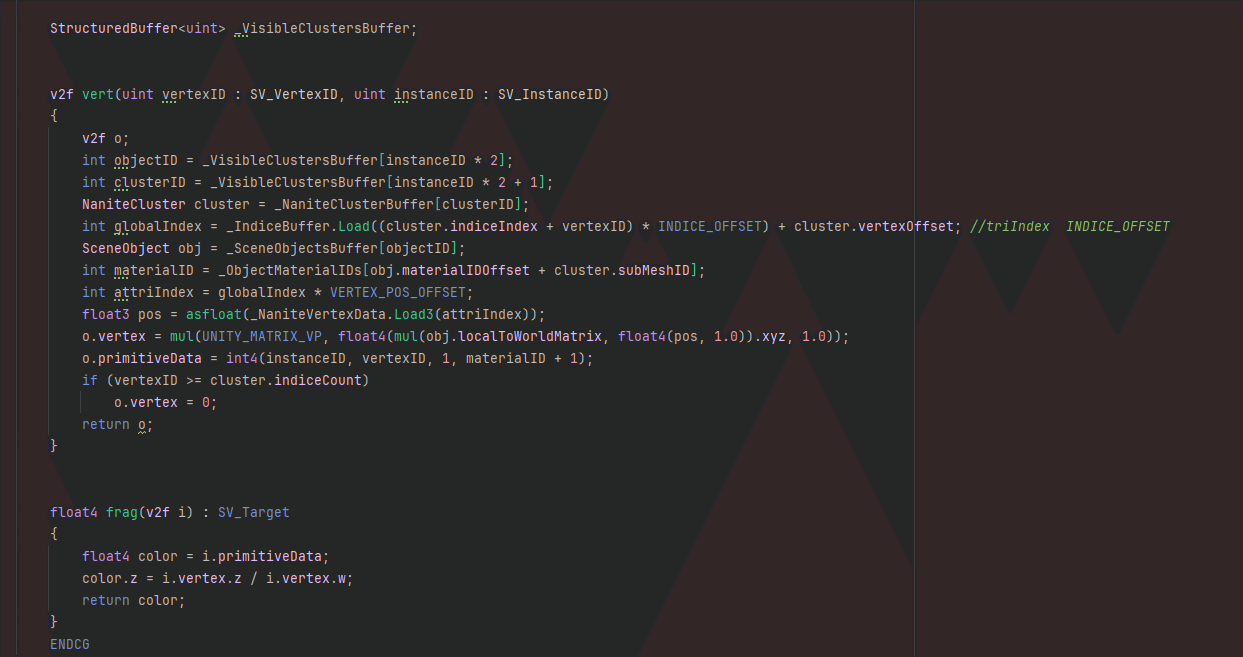
7. VisibilityBuffer
VBuffer主要用来减少Overdraw,着色器直接输出InstanceID、ClusterID、材质ID。然后用这个VBuffer来计算顶点数据来着色。

这个得益于GPUDriven的好处,一个DrawProceduralIndirect就可以绘制所有物体了:
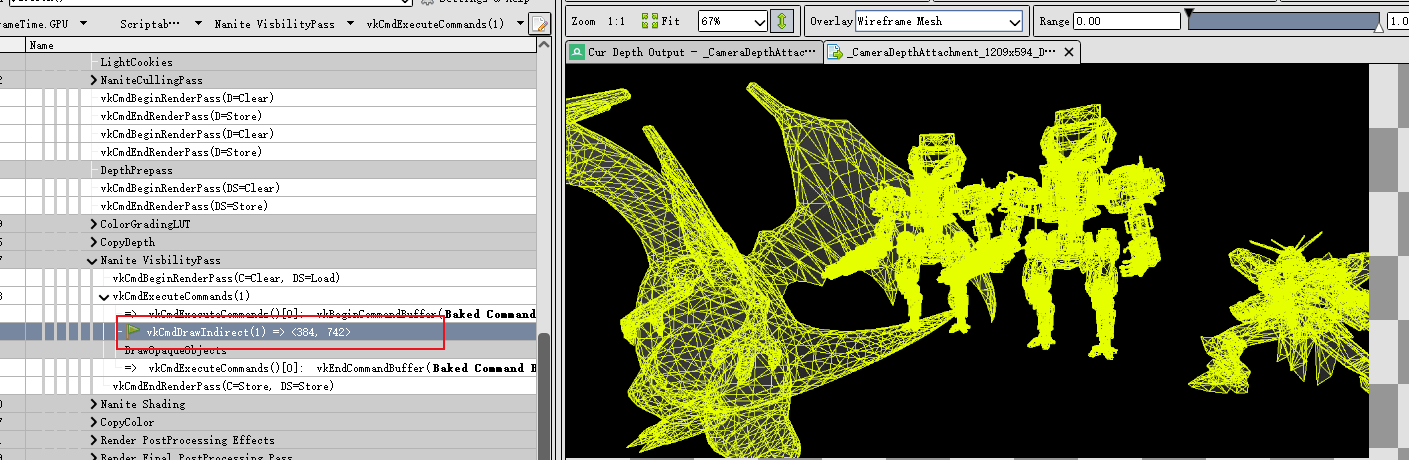
一次DrawProceduralIndirect绘制多个物体
VBuffer存哪些属性,多少位,都是工程细节这里就不考究了。
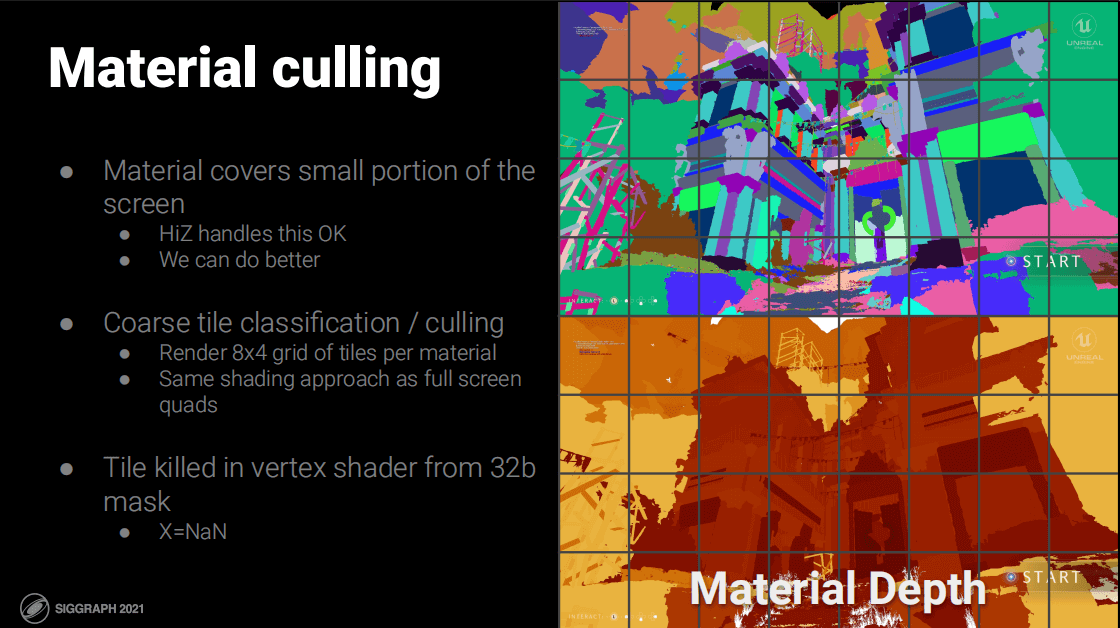
8. 着色
有了VBuffer就需要逐材质进行绘制,原文是材质ID分Tile组合IndirectDraw画Quad的思想。
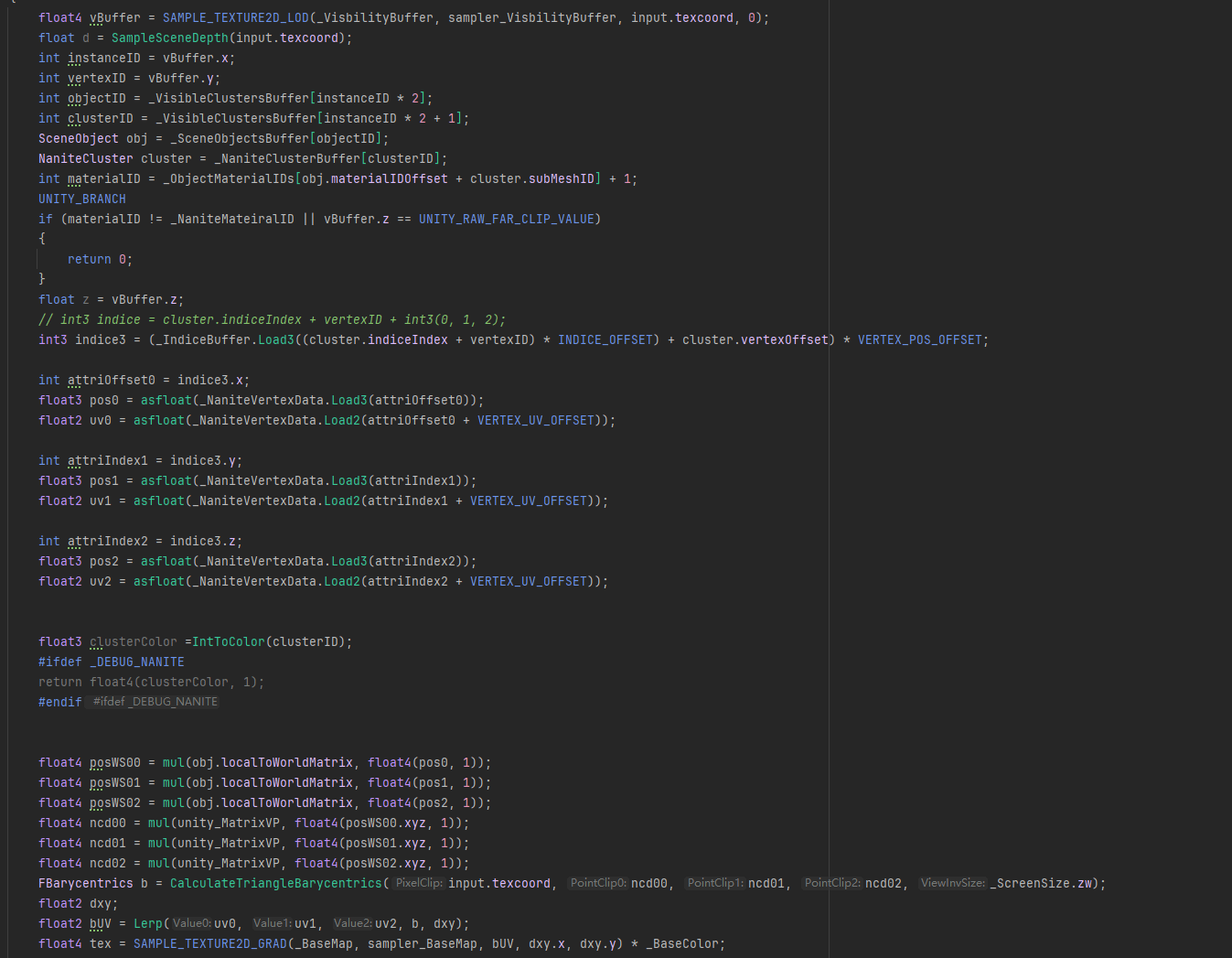
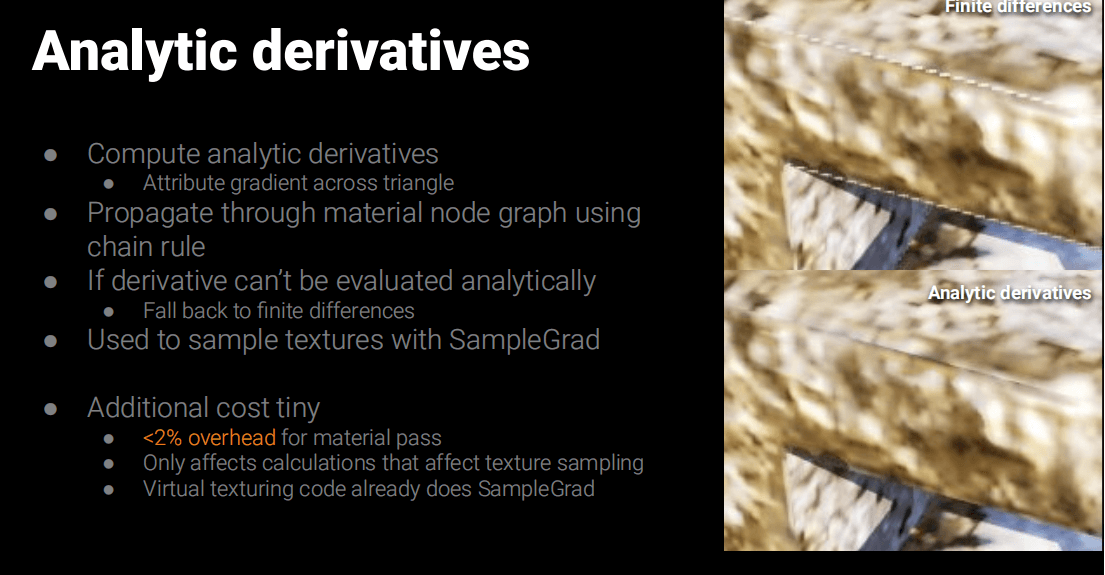
需要注意一下这里VBuffer通过三角重心插值求出的UV是不能直接采样贴图的,因为DDXY不对,所以需求重新计算,计算的代码放下面。并且利用SampleGrad(samplerName, coord2, dpdx, dpdy)来采样。
uint MurmurMix(uint Hash)
{
Hash ^= Hash >> 16;
Hash *= 0x85ebca6b;
Hash ^= Hash >> 13;
Hash *= 0xc2b2ae35;
Hash ^= Hash >> 16;
return Hash;
}
float3 IntToColor(uint Index)
{
uint Hash = MurmurMix(Index);
float3 Color = float3
(
(Hash >> 0) & 255,
(Hash >> 8) & 255,
(Hash >> 16) & 255
);
return Color * (1.0f / 255.0f);
}
struct FBarycentrics
{
float3 Value;
float3 Value_dx;
float3 Value_dy;
};
float2 Lerp(float2 Value0, float2 Value1, float2 Value2, FBarycentrics Barycentrics, out float2 dxy)
{
float2 Value = Value0 * Barycentrics.Value.x + Value1 * Barycentrics.Value.y + Value2 * Barycentrics.Value.z;
dxy.x = Value0 * Barycentrics.Value_dx.x + Value1 * Barycentrics.Value_dx.y + Value2 * Barycentrics.Value_dx.z;
dxy.y = Value0 * Barycentrics.Value_dy.x + Value1 * Barycentrics.Value_dy.y + Value2 * Barycentrics.Value_dy.z;
return Value;
}
/** Calculates perspective correct barycentric coordinates and partial derivatives using screen derivatives. */
FBarycentrics CalculateTriangleBarycentrics(float2 PixelClip, float4 PointClip0, float4 PointClip1,
float4 PointClip2, float2 ViewInvSize)
{
FBarycentrics Barycentrics;
PixelClip.y = 1 - PixelClip.y;
PixelClip.xy = PixelClip.xy * 2 - 1;
const float3 RcpW = rcp(float3(PointClip0.w, PointClip1.w, PointClip2.w));
const float3 Pos0 = PointClip0.xyz * RcpW.x;
const float3 Pos1 = PointClip1.xyz * RcpW.y;
const float3 Pos2 = PointClip2.xyz * RcpW.z;
const float3 Pos120X = float3(Pos1.x, Pos2.x, Pos0.x);
const float3 Pos120Y = float3(Pos1.y, Pos2.y, Pos0.y);
const float3 Pos201X = float3(Pos2.x, Pos0.x, Pos1.x);
const float3 Pos201Y = float3(Pos2.y, Pos0.y, Pos1.y);
const float3 C_dx = Pos201Y - Pos120Y;
const float3 C_dy = Pos120X - Pos201X;
const float3 C = C_dx * (PixelClip.x - Pos120X) + C_dy * (PixelClip.y - Pos120Y);
// Evaluate the 3 edge functions
const float3 G = C * RcpW;
constfloat H = dot(C, RcpW);
constfloat RcpH = rcp(H);
// UVW = C * RcpW / dot(C, RcpW)
Barycentrics.Value = G * RcpH;
// Texture coordinate derivatives:
// UVW = G / H where G = C * RcpW and H = dot(C, RcpW)
// UVW' = (G' * H - G * H') / H^2
// float2 TexCoordDX = UVW_dx.y * TexCoord10 + UVW_dx.z * TexCoord20;
// float2 TexCoordDY = UVW_dy.y * TexCoord10 + UVW_dy.z * TexCoord20;
const float3 G_dx = C_dx * RcpW;
const float3 G_dy = C_dy * RcpW;
constfloat H_dx = dot(C_dx, RcpW);
constfloat H_dy = dot(C_dy, RcpW);
Barycentrics.Value_dx = (G_dx * H - G * H_dx) * (RcpH * RcpH) * (2.0f * ViewInvSize.x);
Barycentrics.Value_dy = (G_dy * H - G * H_dy) * (RcpH * RcpH) * (-2.0f * ViewInvSize.y);
return Barycentrics;
}
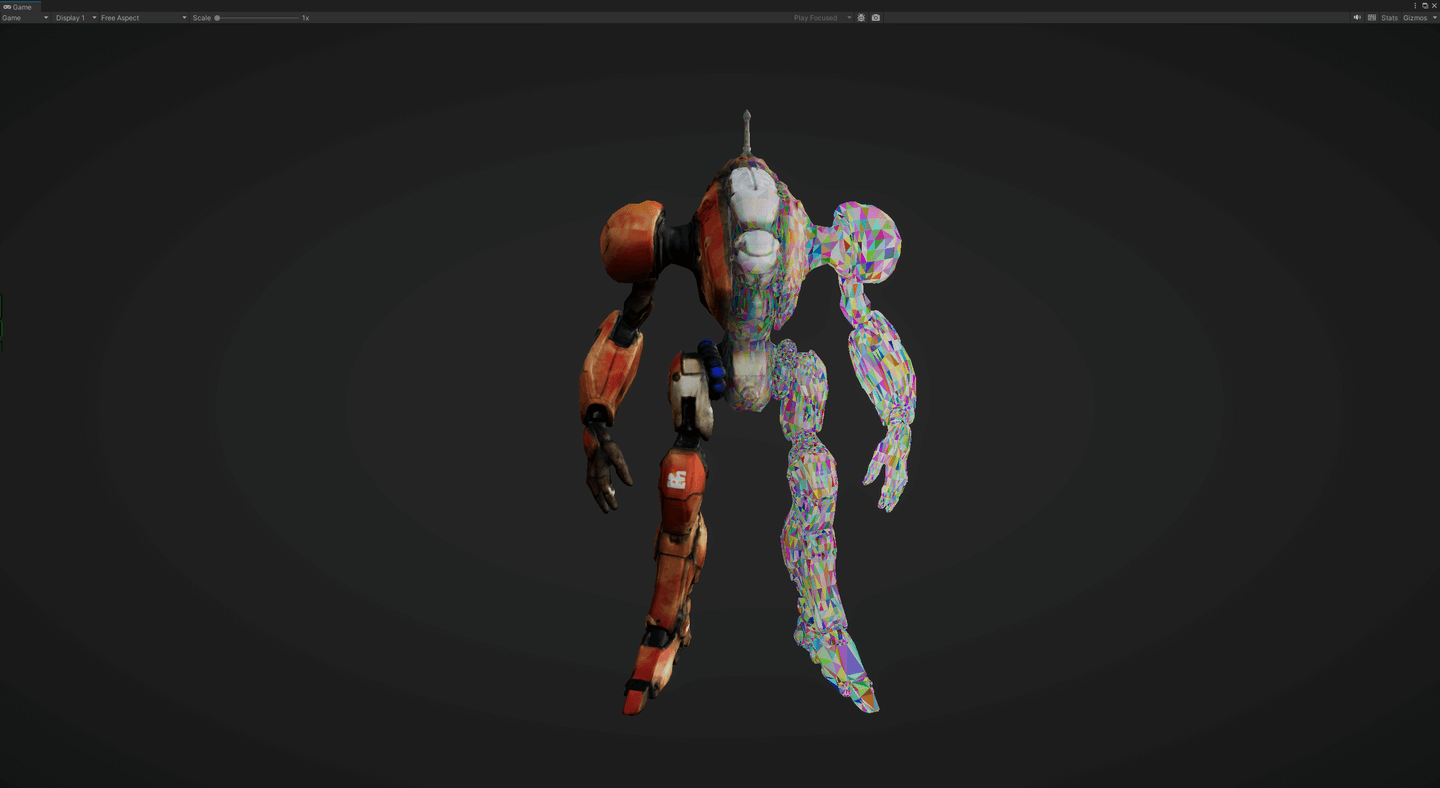
到这里其实基本完成了,利用IntToColor函数,可以对ClustersID或者IndexID对三角形或Cluster进行可视化。
三、总结
不得不说Nanite技术真是太强大了,但是也有很多工程细节需要处理,本文只是实现了其中一小部分。整体像是处理图片的Mipmap过程。
参考
22.GPU驱动的几何管线-nanite (Part 2) | GAMES104-现代游戏引擎:从入门到实践
[UnrealCircle]Nanite技术简介 | Epic Games China 王祢
Karis_Nanite_SIGGRAPH_Advances_2021_final.pdf
UE5 Nanite源码入口:
Engine\Source\Runtime\Renderer\Private\Nanite\NaniteCullRaster.cpp (渲染流程入口)
Engine\Shaders\Private\Nanite\ (GPU的Shader入口)
Engine\Source\Developer\NaniteBuilder\Private\ (离线生成Nanite资源入口)
这是侑虎科技第1939篇文章,感谢作者傻头傻脑亚古兽供稿。欢迎转发分享,未经作者授权请勿转载。如果您有任何独到的见解或者发现也欢迎联系我们,一起探讨。(QQ群:793972859)
作者主页:https://www.zhihu.com/people/tian-cai-ya-gu-shou
再次感谢傻头傻脑亚古兽的分享,如果您有任何独到的见解或者发现也欢迎联系我们,一起探讨。(QQ群:793972859)